
CanSat, powstający w roku akademickim 2015/2016, zaowocował niecodzienną współpracą. To projekt, który z inicjatywy dwojga członków pierwszego zespołu CanSat, pracujących ówcześnie w Europejskiej Organizacji Badań Jądrowych CERN, został utworzony ze wsparciem finansowym i infrastrukturalnym CERN IdeaSquare. Wyjazd zespołu na zawody sfinansował natomiast Urząd Miasta Krakowa oraz Akademia Górniczo – Hutnicza.
Sondy w postaci lądowników planetarnych, powstające na zawody CanSat Competition, mają na celu przybliżyć studentom przebieg przygotowań i realizacji prawdziwych misji kosmicznych. To założenie dyktuje format przygotowywanej dokumentacji i testowania konstrukcji oraz sposobu oceniania. Pierwsze dwa etapy konkursu polegają na napisaniu dokumentów Design Review oraz Critical Design Review i zaprezentowaniu ich podczas telekonferencji z sędziami z NASA. Podczas finału, który odbywa się w Teksasie, drużyna ma za zadanie przedstawić elementy sondy pod kątem wymogów regulaminowych oraz kwestii bezpieczeństwa. Następnie odbywają się starty rakiet, po których przedstawiane są wyniki misji i wyciągnięte z niej wnioski. Co roku stawiane przed uczestnikami zadanie jest nieco inne, jednak forma przeprowadzania zawodów pozostaje niezmienna.
Misja sondy CanSat 2016:
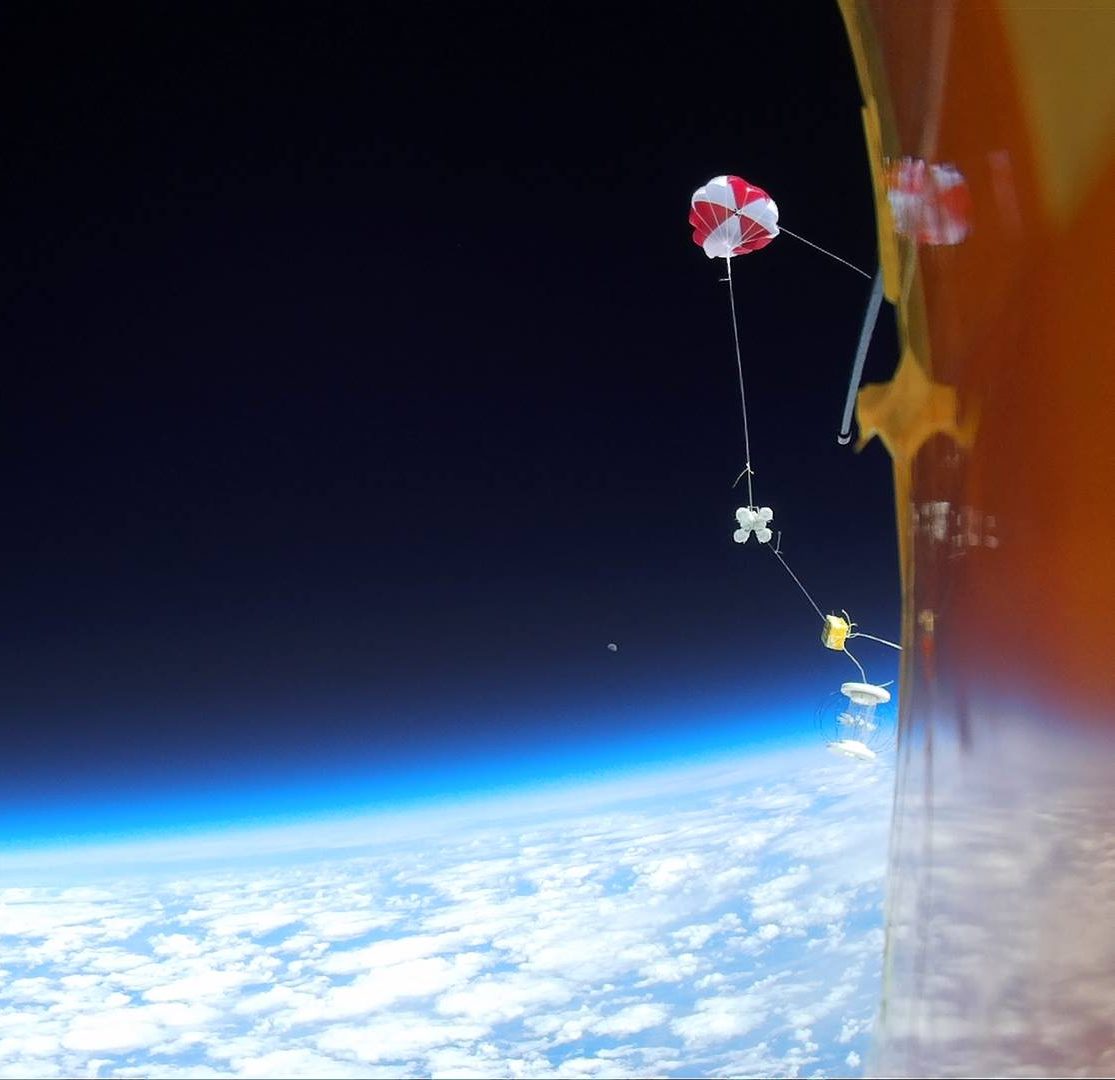
CanSat Competition 2016 rzucił wyzwanie skonstruowania szybującej sondy w celu symulacji misji eksploracji atmosfery Wenus. Lądownik musiał zmieścić się w kontenerze ochronnym o maksymalnych wymiarach 125 mm średnicy i 310 mm wysokości, a sumaryczna waga miała wynosić 500 +/- 10 g. Kontener miał za zadanie osłaniać sondę podczas lotu i w trakcie wyrzutu z rakiety w apogeum oraz stabilizować lot, w jego pierwszej fazie, dzięki odpowiedniemu spadochronowi. Po osiągnięciu wysokości 400 m nad ziemią lądownik uwalniał się automatycznie i rozwijał płaty skrzydeł za pomocą systemu cięgien rozkładających i rozchylających teleskopowe rurki.
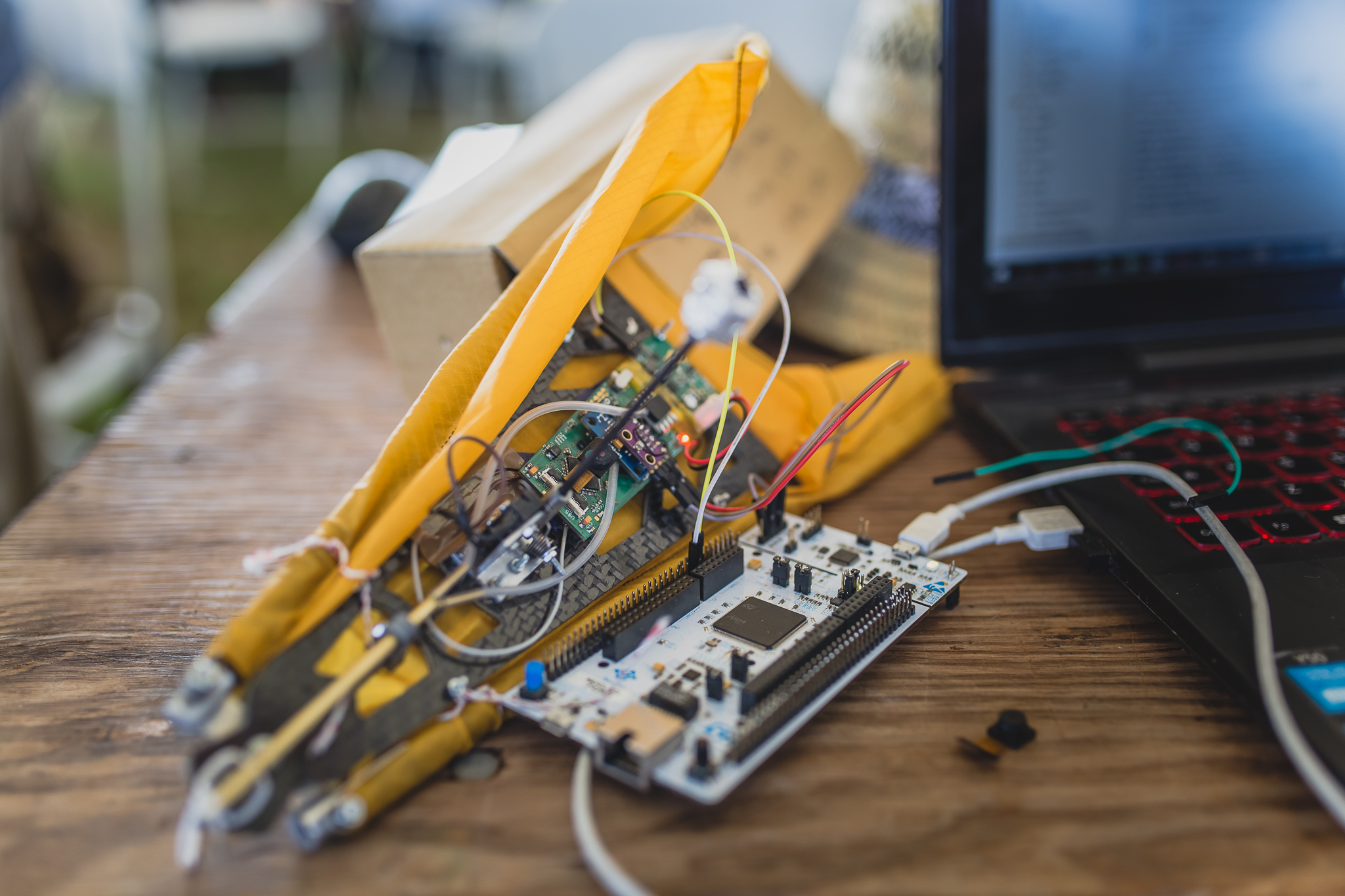
Następnie miał szybować po spirali o średnicy nieprzekraczającej 1 km z czasem lotu możliwie najbliższym 2 min. Od momentu uruchomienia zbierał takie informacje jak: temperatura, ciśnienie, przyspieszenia, współrzędne GPS, prędkość lotu przy użyciu rurki Pitota. Jako zadanie dodatkowe sonda wykonywała zdjęcie na polecenie odebrane ze stacji naziemnej, a następnie przesyłała je do operatora przed lądowaniem. Po przyziemieniu przechodziła w stan odzyskiwania, uruchamiała buzzer, a członkowie zespołu musieli znaleźć zarówno ją, jak i kontener.
Realizacja projektu spotykała się podczas całego roku z wieloma przeciwnościami, co skutkowało dużymi opóźnieniami w harmonogramie i w efekcie niezwykle ograniczyło możliwości testowania podsystemów. Udało się zrealizować wszystkie założenia regulaminowe poza uzyskaniem poprawnych odczytów z rurki Pitota.
Misja nie obyła się jednak bez awarii. Podczas lotu finałowego stworzona przez nas elektronika zadziałała bez zarzutu. Problemy pojawiły się podczas separacji lądownika z kontenerem. System przepalania linki łączącej odpalił się poprawnie, lecz lądownik zablokował się wewnątrz osłony i jej nie opuścił. Poskutkowało to uniemożliwieniem szybowania po spirali.
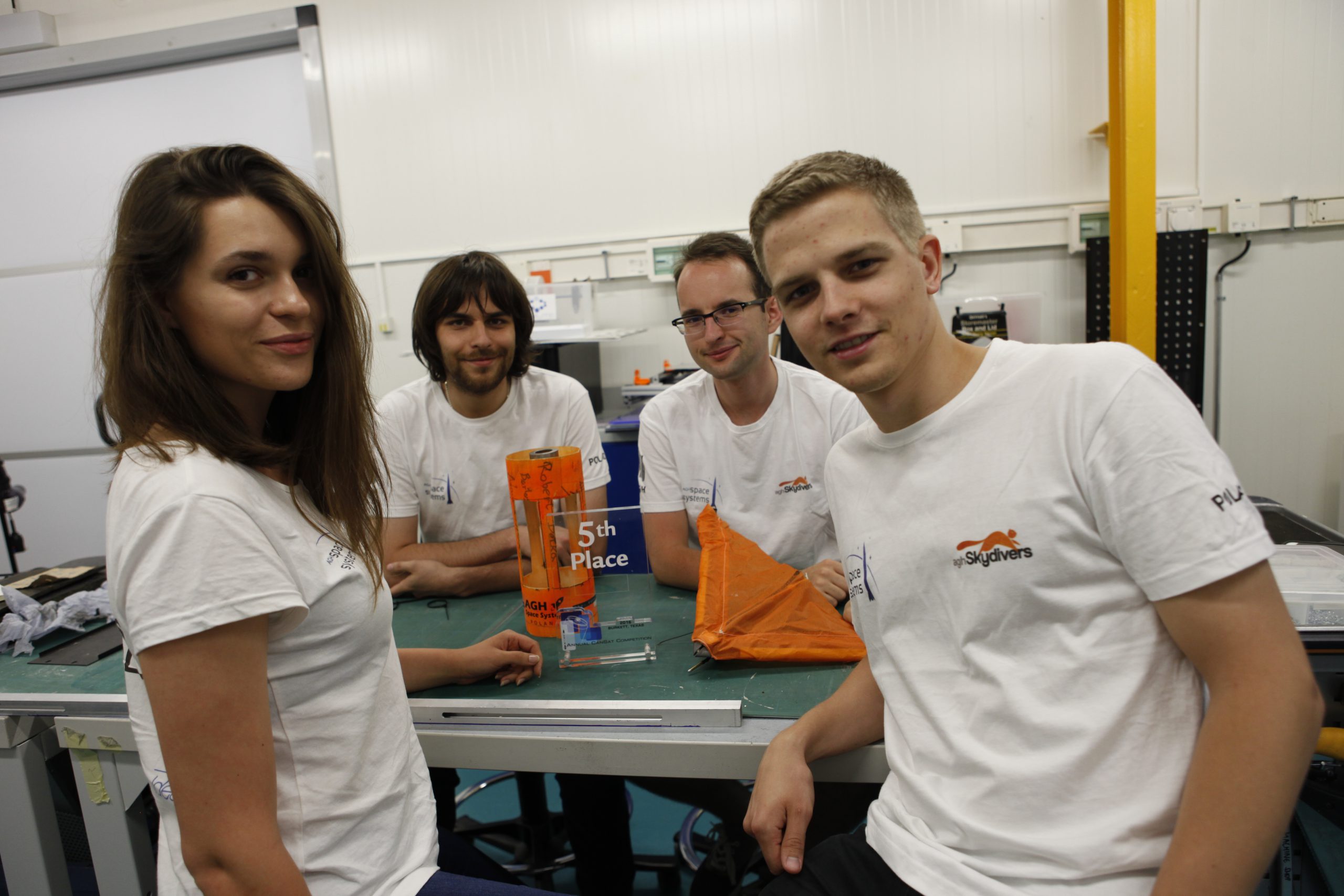
Zespół zaprezentował efekty misji oraz wszystkie zastosowane rozwiązania podczas Post Flight Review, które spotkały się z dużą aprobatą sędziów.
Występujący pod nazwą AGH Skydivers zespół, dzięki wynikom w pierwszych etapach zawodów (w tym 97,62% za dokumentację PDR i 99,68% za dokumentację CDR) oraz misji finałowej, pokonał 55 drużyn z całego świata i tym samym zdobył 5. miejsce w CanSat Competition 2016.
Efekty rocznej współpracy zostały podsumowane podczas zorganizowanego przez nas wydarzenia „AGH Space Systems x CERN IdeaSquare cooperation summary conference”, które odbyło się właśnie w IdeaSquare. Poza projektem CanSat 2016 swoje działania zaprezentowali również gospodarze oraz przedstawiciele koła, którzy przyjechali z Krakowa, a gośćmi byli pracownicy CERN i ONZ.
Lider: Jakub Rachucki
Sekcja mechaniki: Weronika Mrozińska, Tomasz Strzałka
Sekcja elektroniki: Jakub Rachucki, Zbigniew Kostka, Bartosz Moczała
Sekcja stacji naziemnej: Jacek Garbuliński
Sekcja logistyki i marketingu: Weronika Mrozińska, Bartosz Postulka