


W roku akademickim 2016/2017 postanowiliśmy wystartować po raz trzeci w międzynarodowych zawodach CanSat Competition, współorganizowanymi przez NASA. Tym razem była to ponownie symulacja misji eksploracji atmosfery Wenus, a lądownik miał szybować podczas misji. Wyjazd zespołu na finał zawodów umożliwili ludzie wspierający naszą inicjatywę dzięki wpłatom w kampanii crowdfundingowej na portalu PolakPotrafi.pl oraz Akademia Górniczo – Hutnicza.
Sondy w postaci lądowników planetarnych, powstające na zawody CanSat Competition, mają na celu przybliżyć studentom przebieg przygotowań i realizacji prawdziwych misji kosmicznych. To założenie dyktuje format przygotowywanej dokumentacji i testowania konstrukcji oraz sposobu oceniania. Pierwsze dwa etapy konkursu polegają na napisaniu dokumentów Design Review oraz Critical Design Review i zaprezentowaniu ich podczas telekonferencji z sędziami z NASA. Podczas finału, który odbywa się w Teksasie, drużyna ma za zadanie przedstawić elementy sondy pod kątem wymogów regulaminowych oraz kwestii bezpieczeństwa. Następnie odbywają się starty rakiet, po których przedstawiane są wyniki misji i wyciągnięte z niej wnioski. Co roku stawiane przed uczestnikami zadanie jest nieco inne, jednak forma przeprowadzania zawodów pozostaje niezmienna.
Misja sondy CanSat 2017:
CanSat 2017 obostrzony był nie tylko wymiarami, w których musiał zmieścić się kontener (125 mm średnicy i 310 mm wysokości) oraz wymaganiami dotyczącymi masy równej 500 +/- 10 g, ale również budżetem mocy. Jedynym źródłem zasilania lądownika były panele fotowoltaiczne. Ponadto diametralną zmianą względem poprzednich edycji było dodanie osobnej elektroniki pokładowej dla kontenera ochronnego, w związku z czym dane nadawane były początkowo przez kontener, a po separacji transmisja z kontenera miała się zakończyć i rozpocząć bezpośrednio z pokładu sondy.
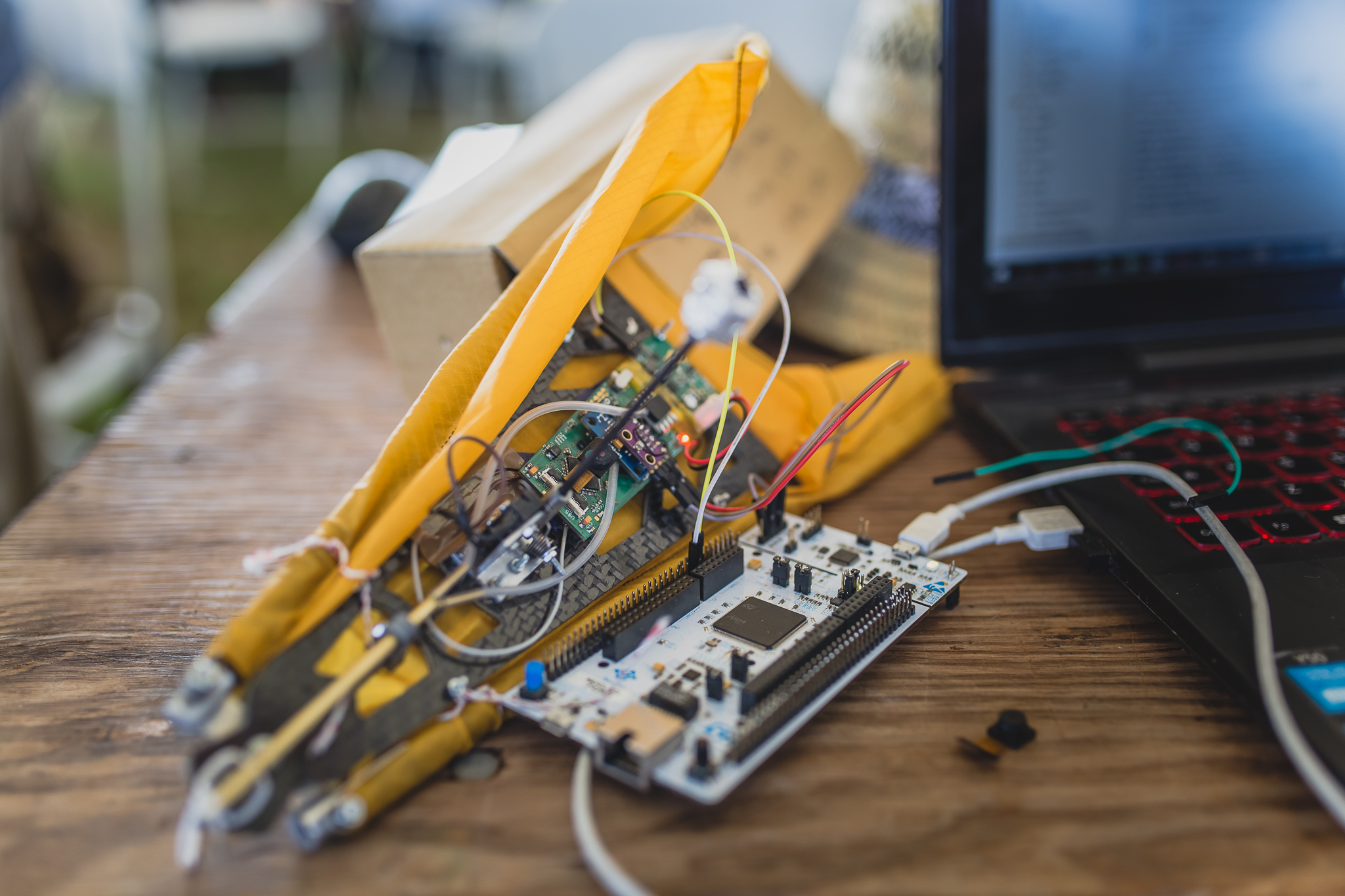
Struktura CanSata została wykonana z wykorzystaniem samodzielnie laminowanych elementów kompozytowych, co zapewniło jej wysoką wytrzymałość i sztywność. W połączeniu z zastosowanymi przez nas panelami fotowoltaicznymi o wysokiej sprawności oraz autorski możliwie – zminiaturyzowany – układ elektroniczny, zapewniło całości bardzo niską masę. Dzięki tym oszczędnościom duża część wymaganych 500 g mogła być ulokowana w odważniku zapewniającym lądownikowi stabilność podczas szybowania.
Elektronika tworzona do projektu CanSata 2017 miała zarówno w przypadku kontenera, jak i lądownika zbierać informacje o ciśnieniu, przyspieszeniach oraz temperaturze, a dodatkowo w tym drugim miała również robić zdjęcia z możliwie najwyższą częstotliwością. Większość zadań udało się zrealizować. Przez opóźnienia w pracach nie działał zapis zdjęć na kartę SD, których wykonywanie jednak było zadaniem dodatkowym.
Lot CanSata został kilkukrotnie przetestowany dzięki wynoszeniu latawcem, rakietą oraz zrzutom. AGH Space Systems zakwalifikowało się do finału bez problemu, a w pierwszym dniu zdobyliśmy 100% punktów za spełnienie założeń regulaminowych. W dniu misji wiał silny wiatr, co spowodowało wiele problemów wszystkim zespołom. Elektronika naszego kontenera działała bez zarzutu i otrzymywaliśmy dane podczas pierwszej fazy lotu, jednak zaledwie kilkanaście metrów przed separacją z lądownikiem, która następowała na wysokości 400 m, utraciliśmy sygnał. CanSat został zwiany tak daleko, że zasięg nie był wystarczający, aby otrzymać jakiekolwiek dane z lądownika. Widzieliśmy separację oraz lot sondy, jednak mimo wielogodzinnych poszukiwań nie udało nam się odnaleźć ani lądownika, ani kontenera.
Zespół uzyskał 94,86% w pierwszym etapie zawodów za Preliminary Design Review i 95,76% w drugim za Critical Design Review. Pomimo utraty lądownika, dzięki tym wynikom oraz powodzeniu części misji i prezentacji Post Flight Review, spośród 89. drużyn uzyskaliśmy 20. miejsce.
Z realizacji tego projektu wyciągnęliśmy wiele cennych lekcji. Zarówno dotyczących inżynierii, jak i logistyki oraz marketingu, które zaowocowały w kolejnych konstrukcjach i inicjatywach.
Lider: Weronika Mrozińska
Sekcja mechaniki: Przemysław Drożdż, Weronika Mrozińska, Artur Biernat, Tomasz Fuchs, Mikołaj Stryja
Sekcja elektroniki: Tomasz Tatara, Jakub Rachucki, Bartosz Moczała, Dagmara Stasiowska
Sekcja stacji naziemnej: Jacek Garbuliński, Karol Horosin
Sekcja logistyki i marketingu: Weronika Mrozińska, Artur Biernat, Bartosz Postulka
