
W roku 2019 po raz piąty wzięliśmy udział w CanSat Competition. Tym razem zadaniem sondy było wykorzystanie zjawiska autorotacji do kontroli upadku, ochrona urządzenia przed wszelkimi uszkodzeniami jakie mogłyby powstać w wyniku lotu oraz zbieranie danych telemetrycznych połączone z transmisją do stacji naziemnej. Gospodarzem konkursu po raz trzeci był uniwersytet Tarleton w Teksasie. Partnerem strategicznym projektu, podobnie jak rok wcześniej została firma Solidbrain.
Sondy w postaci lądowników planetarnych, powstające na zawody CanSat Competition, mają na celu przybliżyć studentom przebieg przygotowań i realizacji prawdziwych misji kosmicznych. To założenie dyktuje format przygotowywanej dokumentacji i testowania konstrukcji oraz sposobu oceniania. Pierwsze dwa etapy konkursu polegają na napisaniu dokumentów Preliminary Design Review oraz Critical Design Review i zaprezentowaniu ich podczas telekonferencji z sędziami z NASA. Podczas finału, który odbywa się w Teksasie, drużyna ma za zadanie przedstawić elementy sondy pod kątem wymogów regulaminowych oraz kwestii bezpieczeństwa. Następnie odbywają się starty rakiet, po których przedstawiane są wyniki misji i wyciągnięte z niej wnioski. Co roku stawiane przed uczestnikami zadanie jest nieco inne, jednak forma przeprowadzania zawodów pozostaje niezmienna.
Misja sondy CanSat 2019:
Wymiary sondy musiały zawierać się w zakresie 125 mm średnicy i 310 mm wysokości – były to rozmiary przedziału rakiety, za pomocą której CanSat miał zostać wyniesiony na odpowiednią wysokość.
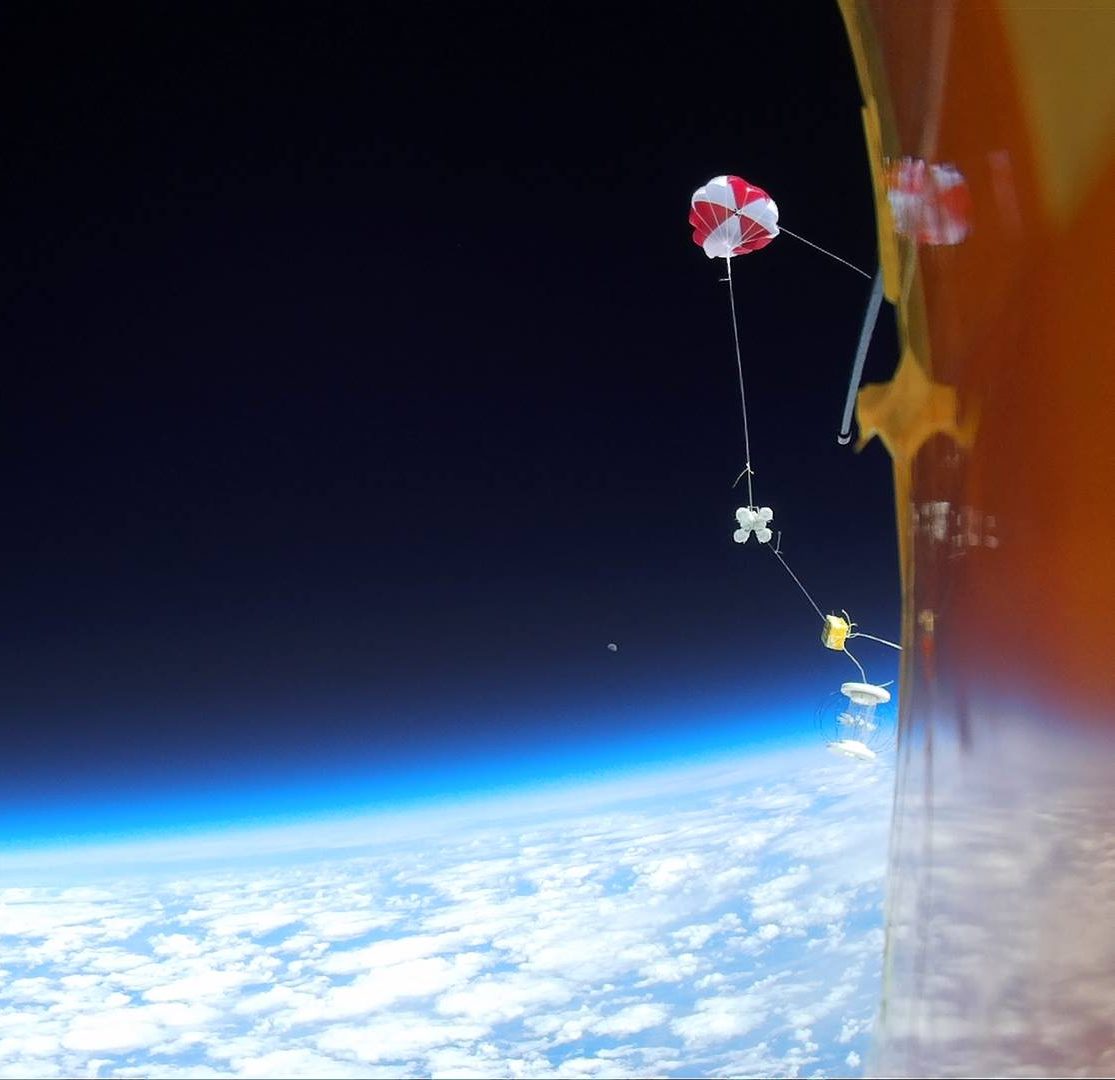
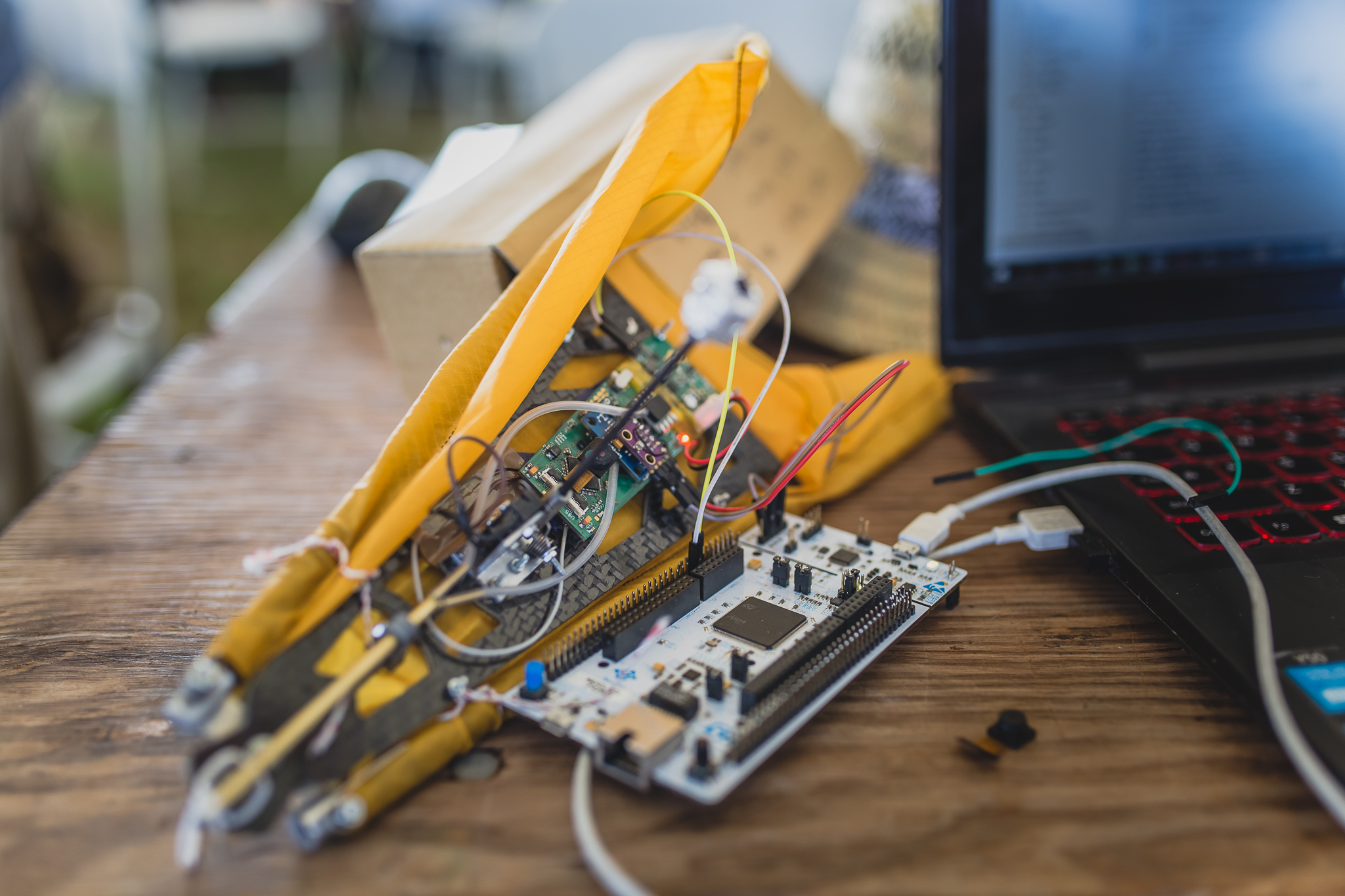
Aby optymalnie wykorzystać zjawisko autorotacji, sonda została wyposażona w wirnik, rozkładany mechanicznie po wystrzeleniu z kontenera. Rozwiązanie to pozwoliło na stworzenie kompaktowej konstrukcji, efektywniej wykorzystującej dostępną przestrzeń. Dodatkowo orientację w przestrzeni kontrolowały trzy lotki sterowane za pomocą pojedynczego serwomechanizmu. Takie wykorzystanie rotacji pozwoliło na zachowanie stałego kierunku i orientacji w powietrzu, z kamerą umieszczoną w sondzie stale skierowaną ku ziemi. CanSat został też wyposażony w spadochron, zapewniający odpowiednią prędkość upadku przed wyzwoleniem sondy, oraz nóżki amortyzujące właściwe lądowanie.
Jednym z najważniejszych zadań urządzenia było prowadzenie stałej transmisji do stacji naziemnej za pomocą modułu XBee. Przesyłano wyniki precyzyjnych pomiarów ciśnienia i temperatury, a także informacje o pozycji sondy i jej orientacji w przestrzeni. Zebrane dane miały później posłużyć do przygotowania prezentacji podsumowującej misję (było to jedno z głównych zadań wpływających na ocenę zespołu). Nagranie z kamery przechowywane było na karcie SD, jego odzyskanie możliwe było dopiero po lądowaniu – sygnalizowanym przez nadajnik CanSata i sygnał dźwiękowy.
Zespół dostał się do finału konkursu, uzyskując wysoki wynik 97.67% na etapie Preliminary Design Review. W ostatnim etapie zawodów zmierzyliśmy się z 39 drużynami z całego świata. Kolejnym sukcesem stało się zdobycie maksymalnej liczby punktów w Flight Readiness Review – ocenie gotowości lotu. Projekt otrzymał też wysokie noty późniejszych etapach. Niestety podczas właściwej misji uszkodzeniu uległ kontener, w którym lot odbywała sonda – spowodowało to nieprzewidziane zachowanie konstrukcji w momencie opuszczenia rakiety, co w połączeniu z silnym wiatrem uniemożliwiło nam odzyskanie konstrukcji. Jednak dzięki uzyskanym w trakcie lotu danym telemetrycznym udało się przygotować wysoko ocenioną prezentację końcową.
W CanSat Competition 2019 AGH Space Systems zajęło 3. miejsce spośród ponad 40 zespołów z całego świata.
Lider: Adam Kolusz
Sekcja mechaniki: Adam Kolusz, Kornel Kowalczyk, Dagmara Stasiowska, Artur Biernat
Sekcja elektroniki: Mateusz Rajzer
Sekcja logistyki i marketingu: Paweł Graczak, Joanna Dubielewska