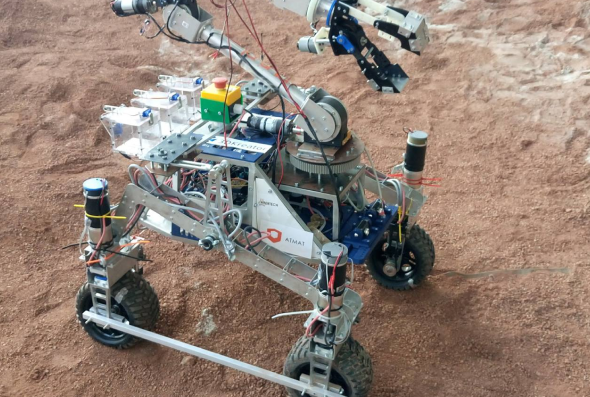

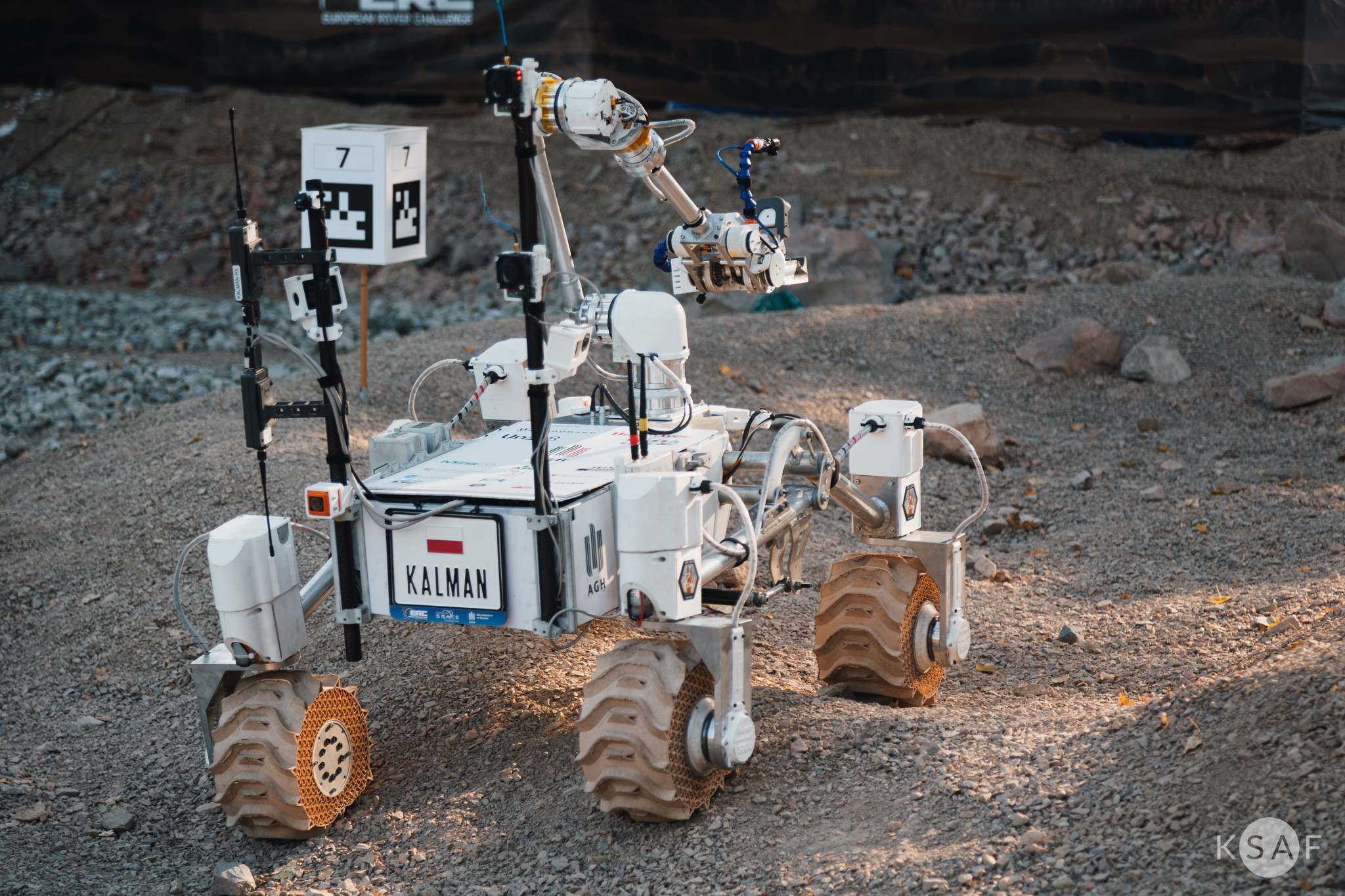
Kalman to drugi łazik planetarny zbudowany przez AGH Space Systems. Mimo, że jest on następcą Phobosa to zastosowano w nim zupełnie nowe podejście do rozwoju systemu, kładąc główny nacisk na modularność oraz prostotę rozwiązań. Przez modularne podejście do systemu w obecnej konstrukcji, nie zostało nic z 2017 roku.
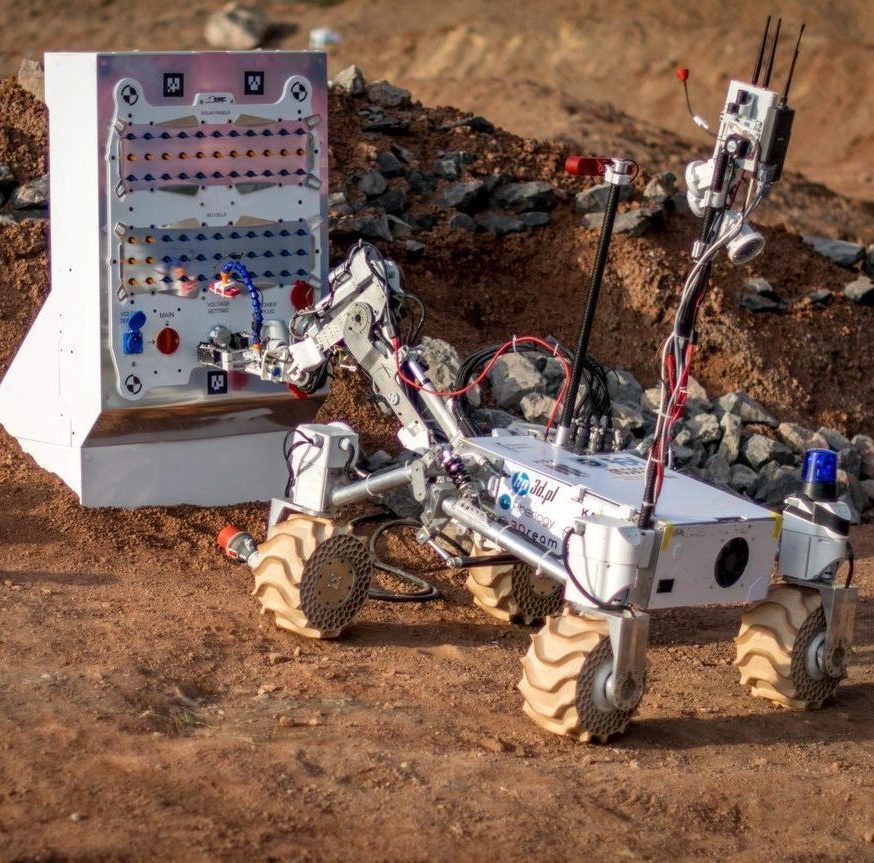
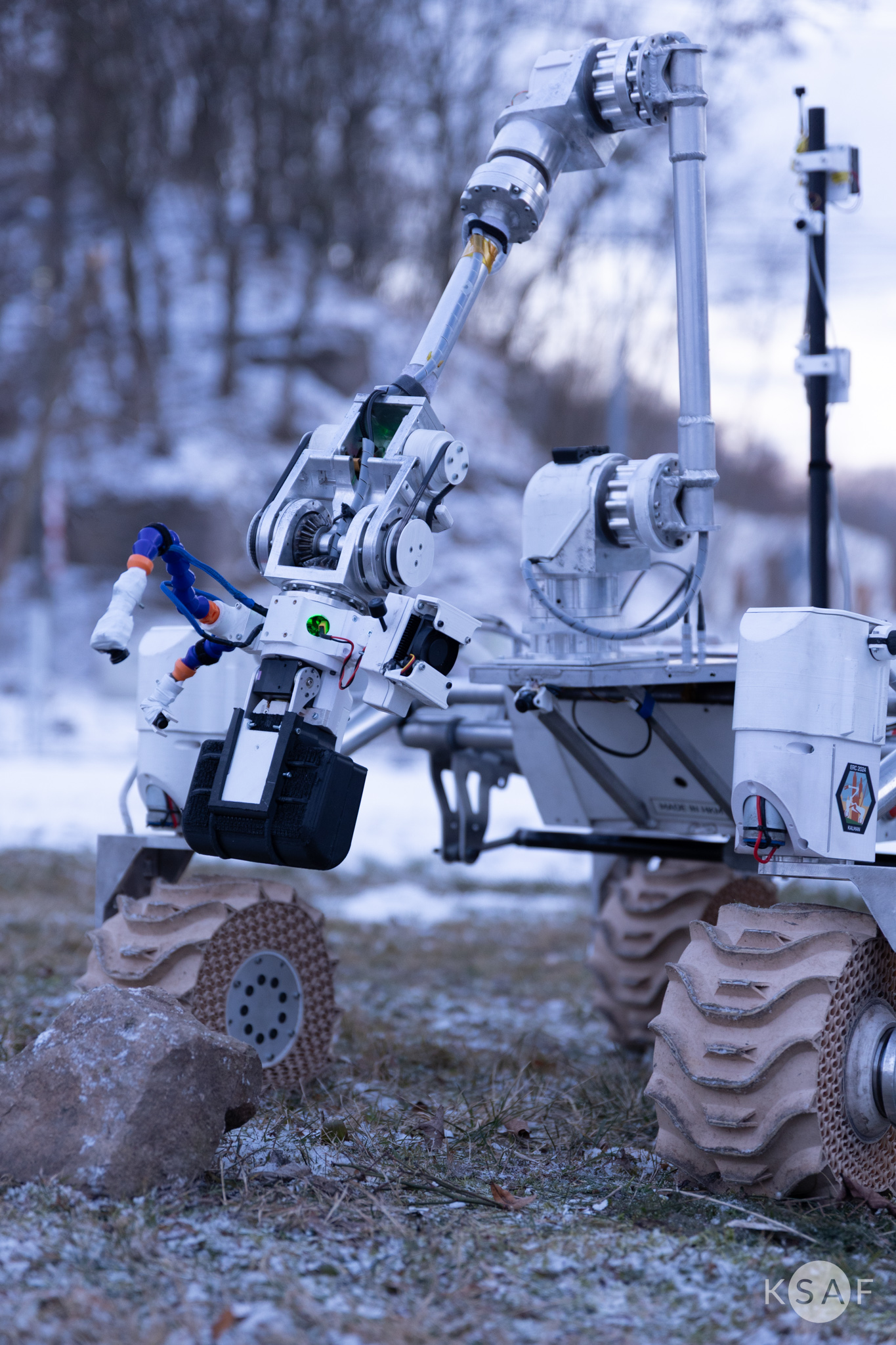
Nowa konstrukcja została wyposażona w systemy wizyjne umożliwiające zdalne sterowanie oraz dokumentowanie terenu. Ponadto zamontowano na nim manipulator pozwalający na wiele czynności, w tym przenoszenie przedmiotów, wykonywanie podstawowych działań naprawczych, obsługę paneli operatorskich. Kalman jest również wyposażony w mobilne laboratorium badawcze, służące do analizy próbek gleby. Konstrukcja posiada także tryb jazdy autonomicznej, która pozwala mu na samodzielną nawigację do wskazanych współrzędnych przez nieznany wcześniej teren.
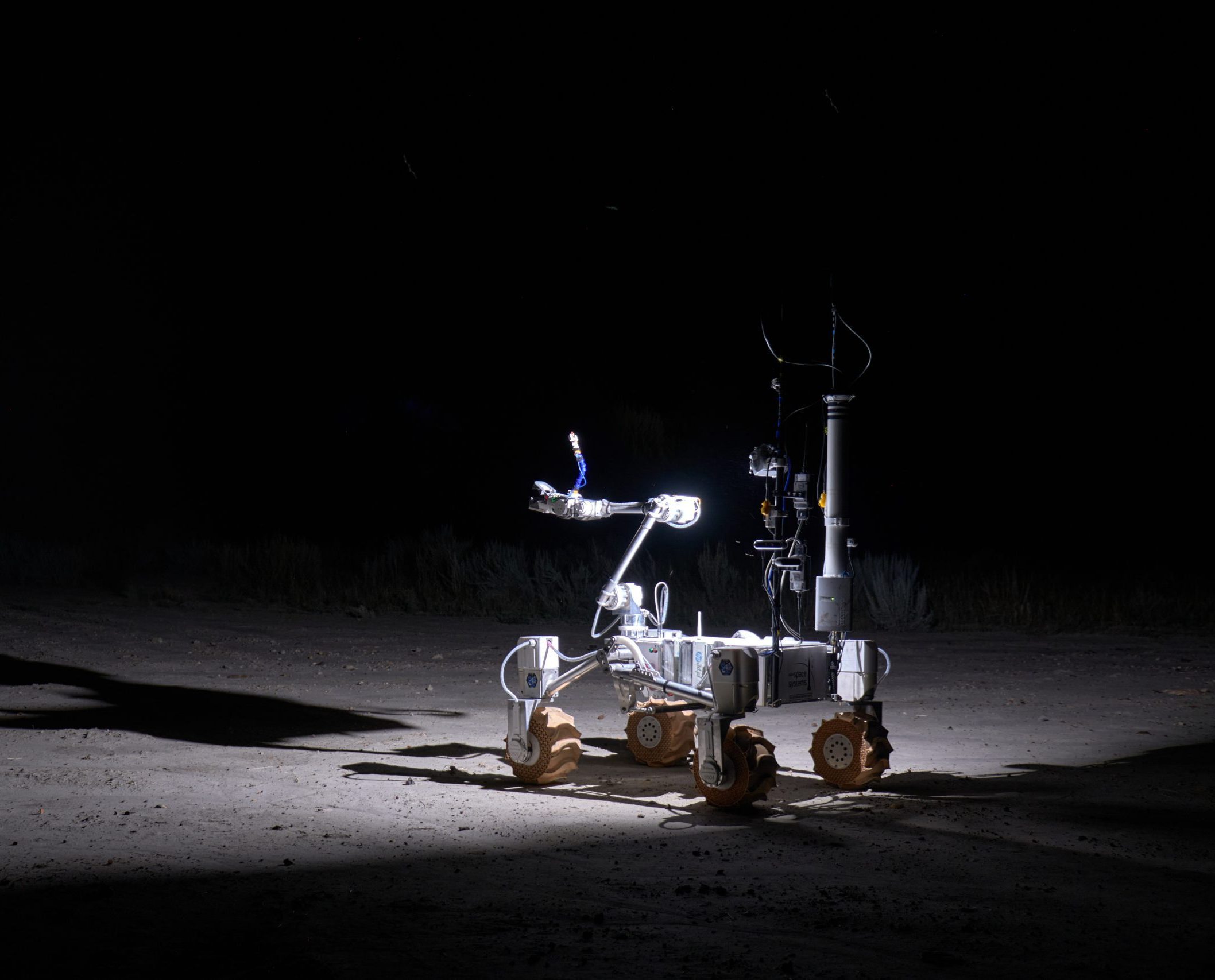
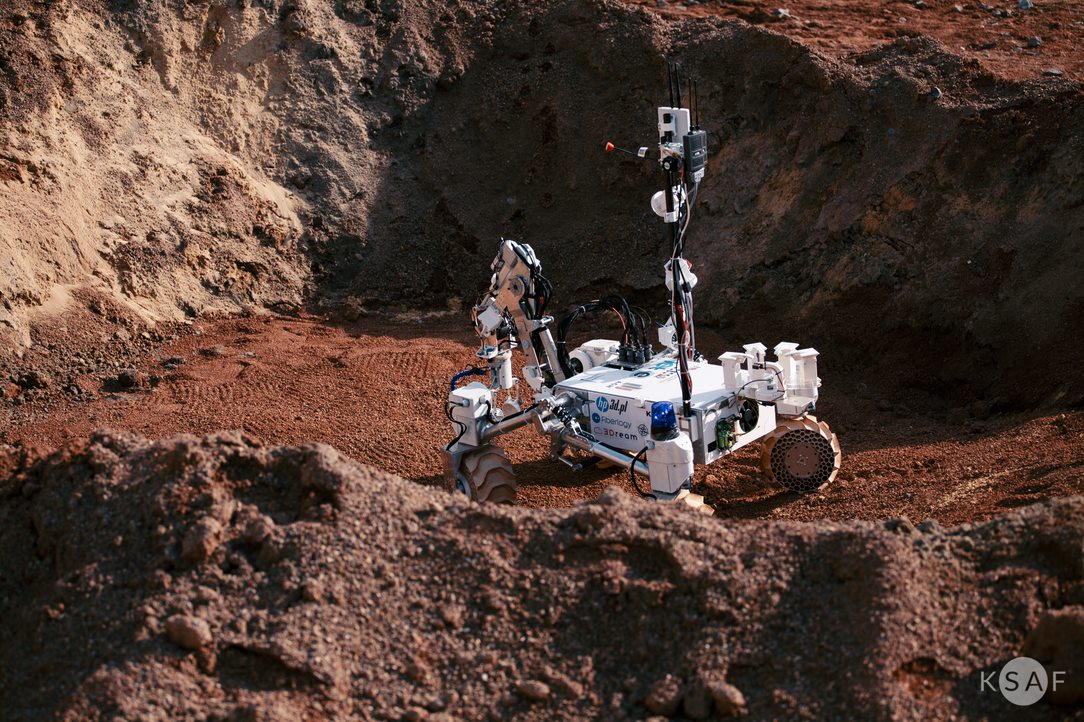
Celem projektu jest stworzenie w pełni funkcjonalnego robota, który będzie w stanie pokonywać trudny teren Marsa i Księżyca, testować nowe technologie niezbędne do eksploracji, badać próbki gleby w poszukiwaniu śladów życia oraz wspomagać astronautów przy minimalnej interwencji operatora. Walidacja rozwiązań odbywa się poprzez udział w zawodach z serii Rover Challenge, które są jednym z najbardziej prestiżowych wydarzeń w branży robotyki, skierowanych do studentów. Zawody te odbywają się na całym świecie, a ich konkurencje odwzorowują rzeczywiste wyzwania, przed którymi stoją konstrukcje tego typu.
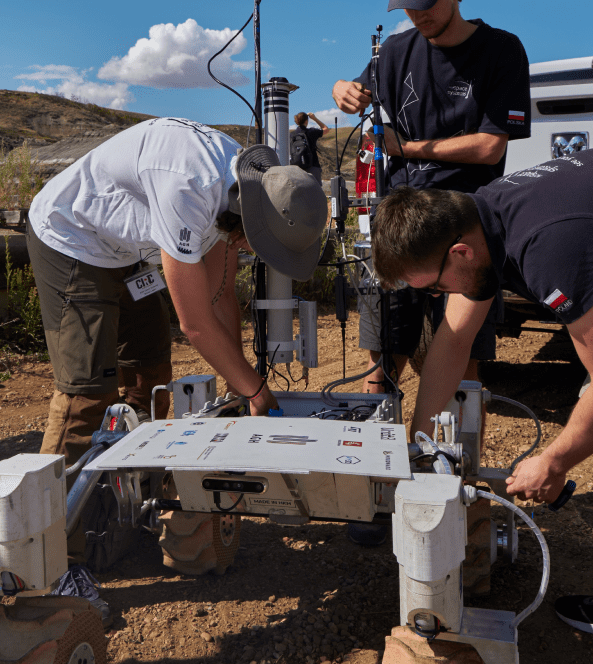
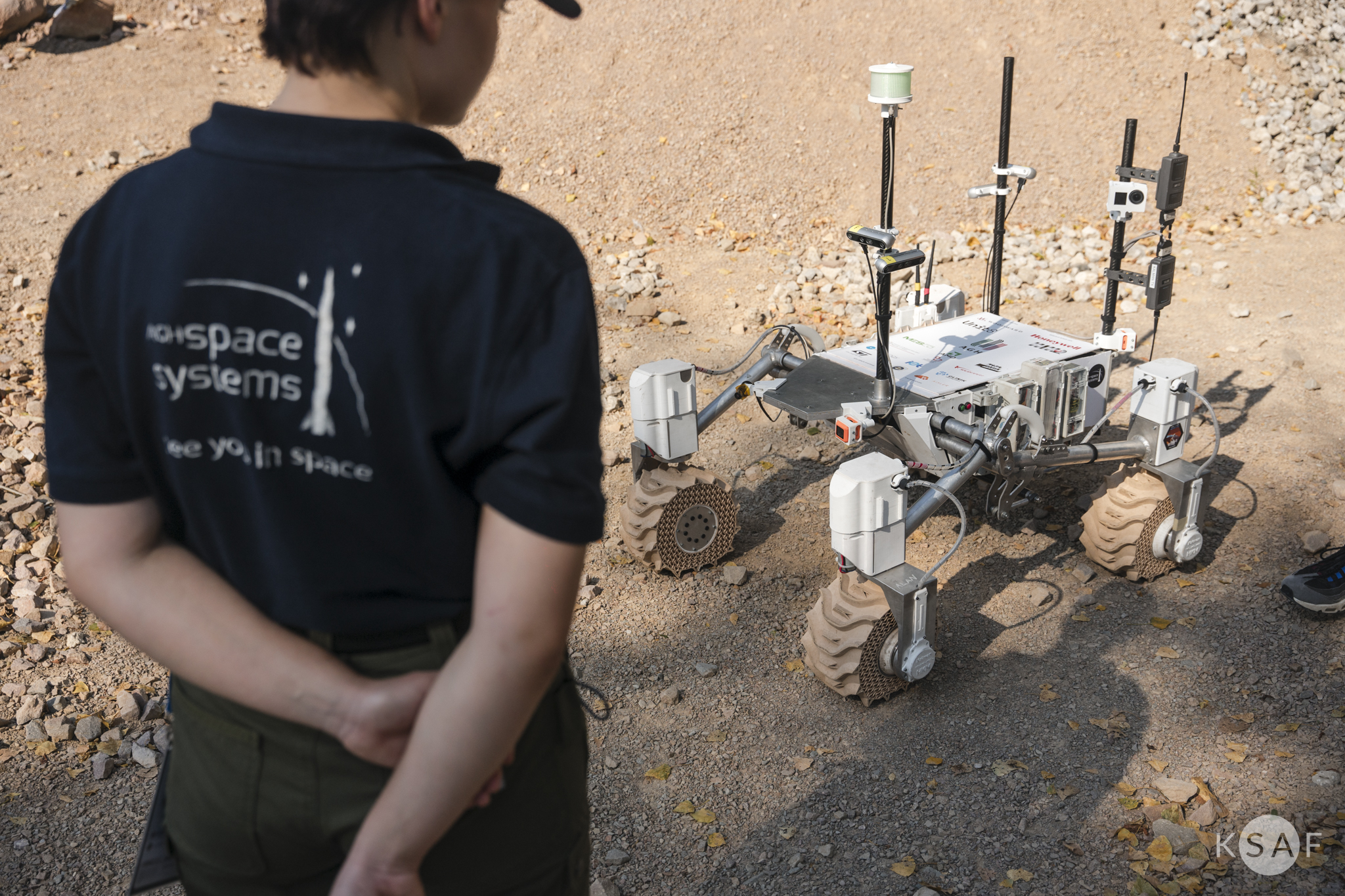
Kolejnym istotnym celem projektu jest stworzenie przestrzeni dla młodych, ambitnych inżynierów i naukowców, którzy pracując nad projektem, zdobywają doświadczenie i rozwijają swoje kariery w różnych branżach przemysłowych i naukowych. Badania i testy przeprowadzane w ramach projektu przyczyniają się również do opracowywania innowacyjnych rozwiązań technologicznych.
Podstawą projektu jest zestaw założeń konstrukcyjnych i organizacyjnych, które zapewniają spójną metodologię pracy:
W konstrukcji łazika zastosowano szereg innowacyjnych rozwiązań technicznych, które zapewniają optymalne parametry:
Efektem pracy nad projektem są sukcesy na międzynarodowych konkursach robotyki mobilnej z serii Rover Challenge, w których zespół regularnie bierze udział. Zawody te są najważniejszym testem i podsumowaniem całorocznej pracy nad konstrukcją. Wśród grona organizatorów tych wydarzeń znajdują się naukowcy oraz centra badawcze, specjalizujące się w działalności kosmicznej, tym samym zapewniając rzetelną i obiektywną ocenę projektu łazika.
W 2018 zespół wraz z Kalmanem zadebiutował na European Rover Challenge, by już rok później zakwalifikować się na University Rover Challenge w Stanach Zjednoczonych, gdzie zdobył 20. pozycję, oraz Indian Rover Challenge i European Rover Challenge, zajmując na obu z nich 2. miejsce. Kolejny rok ciężkiej pracy nad rozwojem łazika zaowocował pierwszym zwycięstwem, jakim było zdobycie 1. miejsca na Indian Rover Challenge 2020.
W 2020 roku projekt zdobył uznanie sędziów na European Rover Challenge, otrzymując nagrody w kategoriach Best Presentation oraz Best Design Award. Pomimo, że pandemia wpłynęła na zwolnienie pracy nad konstrukcją, zespół w 2021 roku wziął udział w Virtual University Rover Challenge, gdzie zajął 6. miejsce, a także w European Rover Challenge 2021, plasując się na 4. miejscu. Znalezienie się tuż za podium stało się motorem napędowym do dalszego rozwoju projektu.
W 2022 roku miały miejsce jedne z największych dotychczasowych osiągnięć projektu: zajęcie 4. miejsca podczas University Rover Challenge, a parę miesięcy później zwycięstwo w European Rover Challenge. Wygrana ta dała zespołowi niesamowite pokłady motywacji i chęci do sięgnięcia jeszcze wyżej i w 2023 roku wzięcia udziału w aż 4 konkursach.

Na początku 2023 roku zespół ponownie zajął 1. miejsce podczas zawodów International Rover Challenge. Następnie, zespół zajął 1. miejsce na Canadian International Rover Challenge, a zwieńczeniem pracy była wygrana drugi rok z rzędu na European Rover Challenge. Jednak to nie jest koniec pracy nad konstrukcją. Projekt planetarnego łazika Kalmana jest nadal rozwijany przez młodych naukowców i inżynierów. Pracując przy nim, zdobywają cenne doświadczenie i umiejętności, które są niezwykle przydatne w dalszej karierze zawodowej i naukowej.
Efektem pracy nad projektem są liczne sukcesy w międzynarodowych zawodach robotyki mobilnej z serii Rover Challenge, w których zespół regularnie uczestniczy. Zawody te stanowią kluczowy test oraz podsumowanie całorocznej pracy nad konstrukcją. Organizatorami tych wydarzeń są naukowcy oraz centra badawcze specjalizujące się w działalności kosmicznej, co zapewnia rzetelną i obiektywną ocenę projektu łazika.
W 2018 roku zespół po raz pierwszy wystartował w European Rover Challenge z łazikiem Kalman. Rok później udało się zakwalifikować do University Rover Challenge w Stanach Zjednoczonych, gdzie drużyna zajęła 20. miejsce. Jeszcze w tym samym roku konstrukcja odniosła duży sukces, zdobywając 2. miejsce zarówno w Indian Rover Challenge, jak i ponownie w European Rover Challenge.
Kolejne miesiące intensywnej pracy przyniosły pierwsze zwycięstwo. Na zawodach Indian Rover Challenge 2020 drużyna stanęła na najwyższym stopniu podium. Podczas European Rover Challenge 2020 projekt zyskał uznanie sędziów, zdobywając nagrody w kategoriach Best Presentation oraz Best Design Award.
Choć pandemia spowodowała opóźnienie rozwoju konstrukcji, zespół nie zaprzestał działalności. W 2021 roku wziął udział w Virtual University Rover Challenge, plasując się na 6. miejscu oraz w European Rover Challenge 2021, gdzie zajął 4. miejsce. Choć drużyna znalazła się tuż za podium, wynik ten stał się motywacją do dalszej pracy.

Rok 2022 przyniósł kolejne osiągnięcia dla łazika Kalman. Zespół zajął 4. miejsce w University Rover Challenge, a kilka miesięcy później odniósł spektakularne zwycięstwo w European Rover Challenge.
W 2023 roku ekipa ponownie triumfowała, zdobywając 1. miejsce w International Rover Challenge. W University Rover Challenge drużyna uplasowała się na 8. pozycji na świecie, jednocześnie zachowując tytuł najlepszego zespołu z Europy. Kolejnym sukcesem było zwycięstwo w Canadian International Rover Challenge, a rok zakończył się ponowną wygraną w European Rover Challenge, co umocniło pozycję zespołu na arenie międzynarodowej. Następny rok przyniósł dla łazika kolejne pasmo sukcesów. Kalman zdobywa pierwsze miejsce na zawodach University Rover Challange 2024. Dodatkowo może pochwalić się 2. miejscem w European Rover Challenge 2024.
Choć lista osiągnięć jest imponująca, prace nad łazikiem Kalman wciąż trwają. Projekt rozwijany jest przez młodych naukowców i inżynierów, którzy zdobywają cenne doświadczenie i umiejętności przydatne w ich dalszej karierze zawodowej i naukowej.Oprócz sukcesów w zawodach robotycznych, wyniki badań oraz opracowań naukowych powstałych w ramach projektu są prezentowane na prestiżowych wydarzeniach. Zespół uczestniczył w International Astronautical Congress w latach 2022, 2023 i 2024, konferencji Robophilosophy 2022 – Social Robots in Social Institutions, Low Gravity Show, Studenckiej Konferencji Kosmicznej, World Space Week Wrocław oraz Cracow Robotics & AI Meetup. Udział w tych wydarzeniach nie tylko popularyzuje technologie kosmiczne i umożliwia ewaluację zastosowanych rozwiązań, ale także daje członkom zespołu możliwość poszerzania wiedzy i dzielenia się swoim doświadczeniem.