
We wrześniu 2015 roku członkowie AGH Space Systems pracowali nad rozwojem rakiety hybrydowej Beta oraz lądownika CanSat. Aby pokryć pełne spektrum misji planetarnej brakowało jeszcze jednego elementu – łazika, dlatego też narodził się projekt Phobos.
Celem budowy pierwszego krakowskiego łazika było zgłębienie zagadnień robotyki kosmicznej oraz udział w międzynarodowych zawodach studenckich. Phobos miał stać się platformą umożliwiającą zdobycie cennego doświadczenie na potrzeby przyszłych konstrukcji oraz wystartować w European Rover Challenge 2016.

Założenia projektu były ściśle oparte na regulaminie zawodów European Rover Challenge. Łazik musiał zmieścić się w sześcianie o boku długości 1 m, a jego masa nie mogła przekroczyć 50 kg. Prędkość konstrukcji została ograniczona do 1 m/s, ale miała nadrabiać swoją zdolnością do poruszania się w trudnym terenie. Dodatkowo oprócz mobilności niezbędne były: możliwość manipulacji obiektami o masie do 2 kg, obsługa typowych przełączników na panelach sterowania oraz pobieranie próbek gleby. Innym ważnym wymaganiem było zdalne sterowanie łazika przez operatora nieposiadającego bezpośredniego kontaktu wzrokowego z nim.
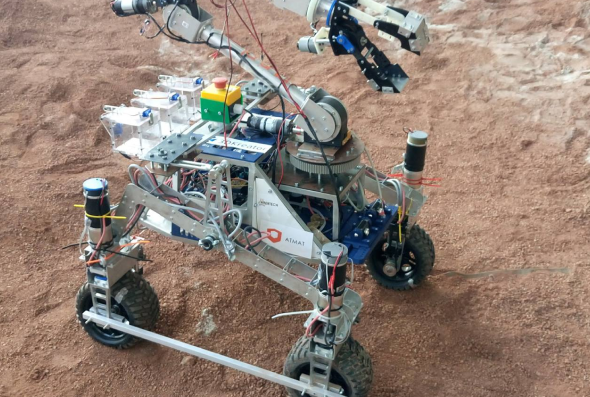
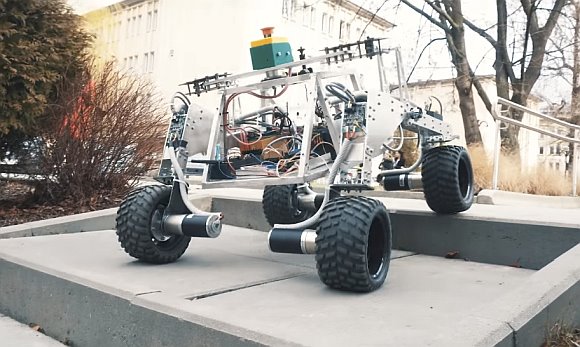
Aby sprostać wymagania projektowe, zespół postanowił zaczerpnąć inspirację od najlepszych, dlatego za daleki wzór obrano łazik Curiosity. Ostatecznie jednak podobieństwa ograniczały się głównie do jego ogólnego kształtu oraz układu podsystemów.
Rama ukrywająca sprzęt elektroniczny, pięcioosiowy manipulator oraz sześciokołowe zawieszenie typu rocker-bogie została wykonana głównie z aluminium. Natomiast do wykonania mniejszych elementów, takich jak szczęki chwytaka oraz obudowy układów elektronicznych, użyto druku 3D.
Jako główne źródło zasilania łazika wykorzystano dwa akumulatory LiFePO4 zapożyczone z motocykli wyścigowych. Do napędu kół oraz manipulatora zastosowano natomiast szczotkowe silniki prądu stałego z samodzielnie dorabianymi enkoderami. Ponadto każdy z silników zamontowanych w kołach oraz manipulator posiadał dedykowany sterownik z mikrokontrolerem STM32, komunikujący się w sieci CAN. Magistrala I2C łączyła je z komputerem pokładowym Raspberry Pi, który komunikował się ze stacja kontrolną wykorzystując transceiver radiowy o częstotilowości 433 MHz podpięty przez interfejs UART.
Ważnym krokiem w kierunku autonomii było stworzenie systemu lokazliacji opartego o odometrię kołową oraz moduł IMU. Do stworzenia systemu wizyjnego zostały użyte cztery mikrokomputery Nano Pi, które streamowały w lokalnej sieci Ethernet obrazy z czterech kamer USB o rozdzielczości 1.3 Mpix każda. Komputer pokładowy miał możliwość przesyłania tych obrazów na stację kontrolną przy pomocy WiFi lub je zapisywać. Dodatkowo jeszcz jedna niezależna kamera przsyłała obraz w czasie rzeczywistym do stacji kontrolnej.
Realizacja projektu Phobos dostarczyła wielu cennych doświadczeń, ale nie obyło się bez trudności. Już pierwszego dnia zawodów konieczna była poważna modyfikacja zawieszenia, w wyniku której usunięto dwa koła. Drukowane w technologii 3D tarcze enkoderów optycznych okazały się całkowitą porażką i musiały zostać szybko wymienione na wersje magnetyczne. Kable zostały ułożone w fatalny sposób, co doprowadziło do zwarcia i uszkodzenia kontrolera manipulatora. W zadaniu nawigacyjnym, w którym nie można było przesyłać obrazu z kamer, zawiodło oprogramowanie odpowiedzialne za lokalizację łazika. Z tego powodu cały przejazd odbył się kompletnie na ślepo i zakończył na banerze reklamowym.
Jednak mimo wszystkich przeciwności zespół AGH Space Systems wraz ze swoim łazikiem Phobos zadebiutował w międzynarodowych zawodach European Rover Challenge 2016, zajmując 17. miejsce na ponad 50 zespołów z całego świata. Niespełna kilka miesięcy później na konferencji ROSCon 2016 odbywającej się w Seulu zaprezentowany został referat opisujący wykorzystanie środowiska ROS i symulatora Gazebo w oprogramowaniu łazika, który został doceniony i nagrodzony przez firmę SICK.
Lider: Robert Betka
Sekcja mechaniki: Bartosz Widera, Jakub Żak, Andrzej Zakręcki
Sekcja elektroniki: Filip Oleszek, Patryk Jarosz, Robert Widlak
Sekcja oprogramowania: Przemysław Walczyk, Wiktor Piwowarczyk, Michał Soida, Krzysztof Lam, Łukasz Jeleń, Adam Zięba
Sekcja badań naukowych: Błażej Zieliński
Sekcja logistyki i marketingu: Robert Betka, Bartosz Postulka, Karol Horosin, Marek Bocian, Justyna Bzdoń