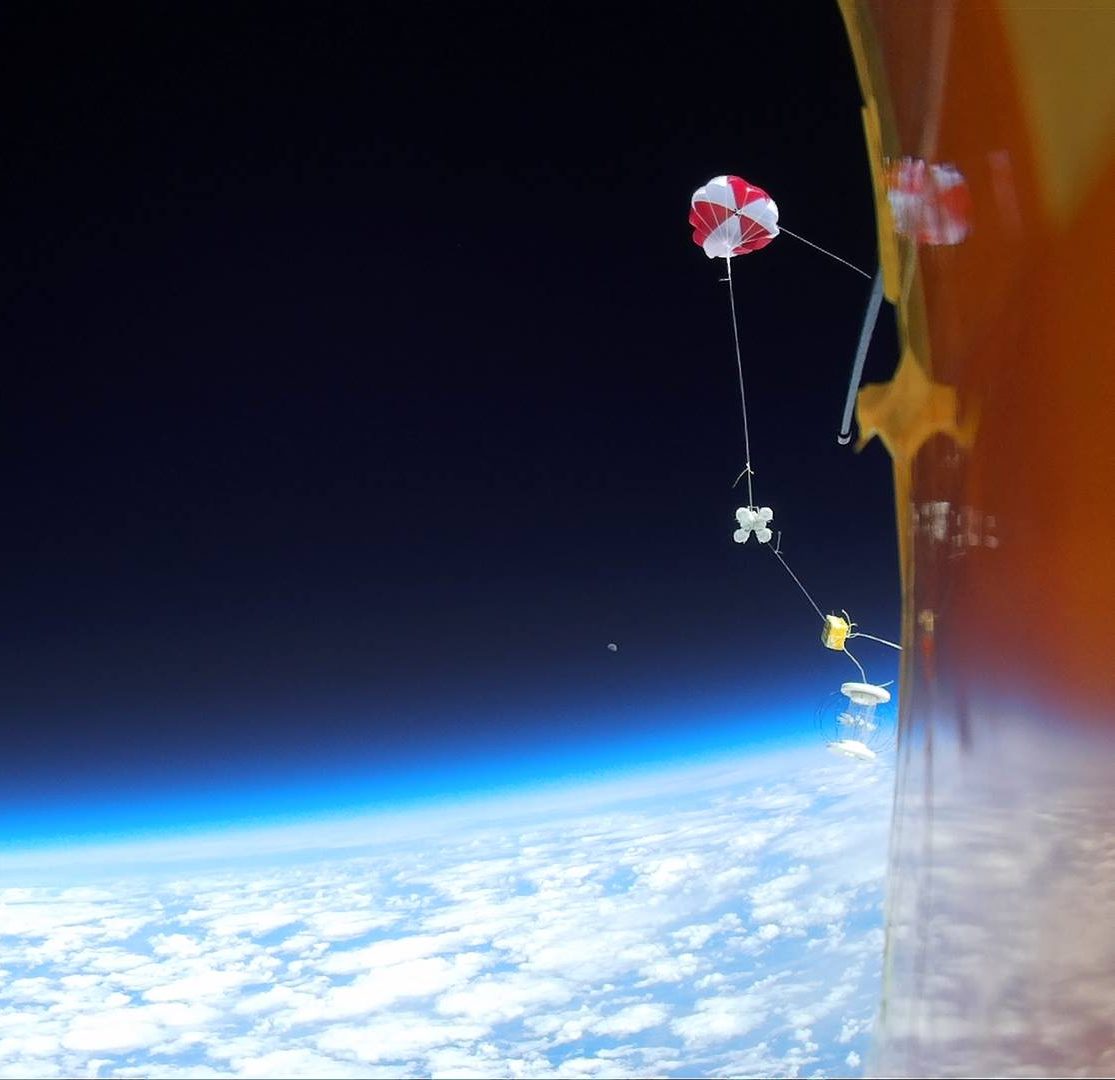

In September 2015, members of AGH Space Systems worked on the development of the Beta hybrid rocket and the CanSat lander. To cover the full spectrum of planetary missions, one element was still missing – a rover, which is how the Phobos project was born.
The goal of building the first Krakow rover was to explore the issues of space robotics and participate in international student competitions. Phobos was meant to become a platform for gaining valuable experience for future designs and compete in the European Rover Challenge 2016.

The project assumptions were strictly based on the rules of the European Rover Challenge competition. The rover had to fit into a cube with a side length of 1 meter, and its mass could not exceed 50 kg. The speed of the design was limited to 1 m/s, but it was meant to make up for this with its ability to move in difficult terrain. Additionally, besides mobility, the rover needed: the ability to manipulate objects weighing up to 2 kg, operating typical switches on control panels, and collecting soil samples. Another important requirement was remote control of the rover by an operator without direct visual contact with it.
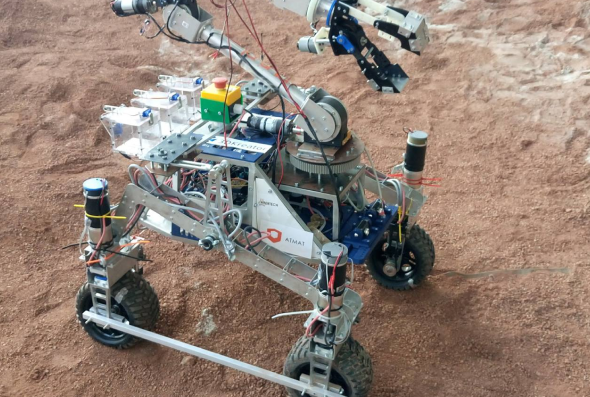
To meet the design requirements, the team decided to draw inspiration from the best, so they chose the Curiosity rover as a distant model. However, the similarities were mainly limited to its overall shape and subsystem arrangement.
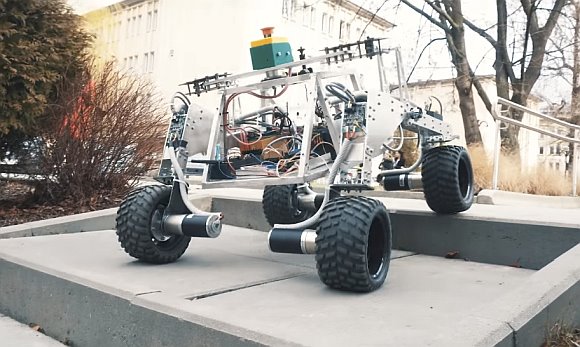
The frame hiding the electronic equipment, the five-axis manipulator, and the six-wheel rocker-bogie suspension were made primarily of aluminum. For smaller components, such as the gripper jaws and enclosures for the electronic systems, 3D printing was used.
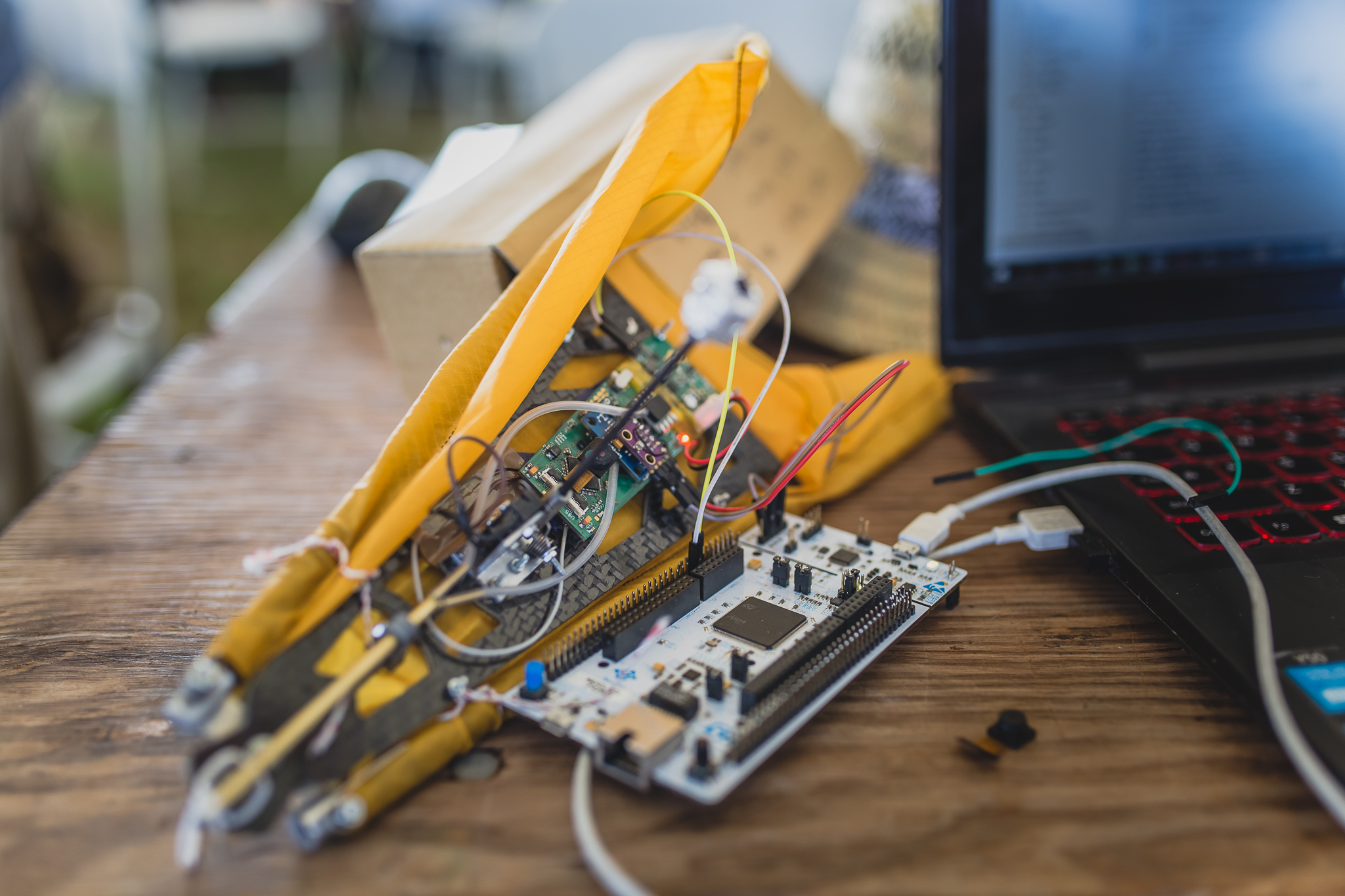
The main power source for the rover was two LiFePO4 batteries borrowed from racing motorcycles. The drive for the wheels and manipulator was provided by brushed DC motors with custom-made encoders. Additionally, each of the motors installed in the wheels and manipulator had a dedicated controller with an STM32 microcontroller, communicating via the CAN network. The I2C bus connected them to the onboard computer Raspberry Pi, which communicated with the control station using a 433 MHz radio transceiver connected via the UART interface.
An important step toward autonomy was the creation of a localization system based on wheel odometry and an IMU module. To create the vision system, four Nano Pi microcomputers were used, which streamed images from four USB cameras, each with a resolution of 1.3 Mpix, over the local Ethernet network. The onboard computer had the ability to transmit these images to the control station via WiFi or save them. Additionally, one independent camera sent real-time images to the control station.
The implementation of the Phobos project provided many valuable experiences, but there were also difficulties. On the first day of the competition, a major suspension modification was required, resulting in the removal of two wheels. The 3D-printed optical encoder discs were a complete failure and had to be quickly replaced with magnetic versions. The cables were laid out poorly, leading to a short circuit and damage to the manipulator controller. In the navigation task, where the camera images could not be transmitted, the software responsible for the rover’s localization failed. As a result, the entire run was completed completely blind and ended up on a banner.
However, despite all the challenges, the AGH Space Systems team, along with their rover Phobos, debuted in the international European Rover Challenge 2016, finishing in 17th place out of over 50 teams from around the world. Just a few months later, at the ROSCon 2016 conference held in Seoul, a paper describing the use of the ROS environment and the Gazebo simulator in the rover’s software was presented, which was appreciated and awarded by the company SICK.
Leader: Robert Betka
Mechanical Section: Bartosz Widera, Jakub Żak, Andrzej Zakręcki
Electronics Section: Filip Oleszek, Patryk Jarosz, Robert Widlak
Software Section: Przemysław Walczyk, Wiktor Piwowarczyk, Michał Soida, Krzysztof Lam, Łukasz Jeleń, Adam Zięba
Research Section: Błażej Zieliński
Logistics and Marketing Section: Robert Betka, Bartosz Postulka, Karol Horosin, Marek Bocian, Justyna Bzdoń