


CanSat, created in the academic year 2015/2016, resulted in an unusual collaboration. It is a project initiated by two members of the first CanSat team, who were working at the time in the European Organization for Nuclear Research (CERN), created with the financial and infrastructural support of CERN IdeaSquare. The team’s trip to the competition was funded by the City of Kraków and the AGH University of Science and Technology.
Probes in the form of planetary landers, created for the CanSat Competition, aim to familiarize students with the preparation and execution of real space missions. This assumption dictates the format of the documentation, testing of the construction, and the evaluation process. The first two stages of the competition involve writing Design Review and Critical Design Review documents and presenting them during a teleconference with judges from NASA. During the final, which takes place in Texas, the team must present the probe’s components in terms of regulatory requirements and safety issues. Then, rocket launches take place, after which the mission results and conclusions are presented. The tasks set before participants change slightly each year, but the competition format remains unchanged.
Mission of the CanSat 2016 probe:
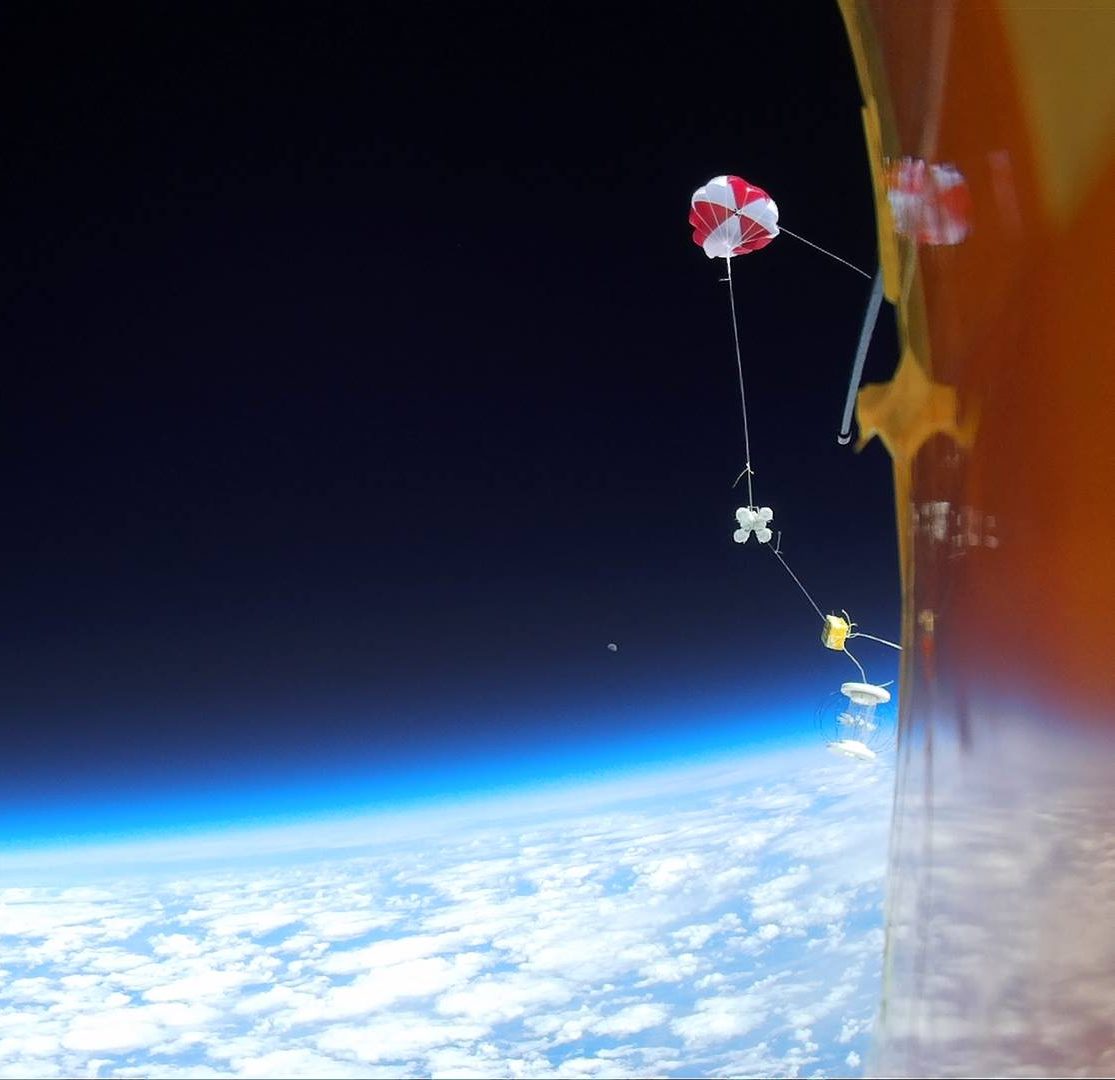
CanSat Competition 2016 posed the challenge of designing a gliding probe to simulate a mission for exploring the atmosphere of Venus. The lander had to fit within a protective container with maximum dimensions of 125 mm in diameter and 310 mm in height, and the total weight had to be 500 +/- 10 g. The container was designed to shield the probe during the flight and during ejection from the rocket at apogee, as well as stabilize the flight in its first phase with an appropriate parachute. Upon reaching 400 m above the ground, the lander would automatically release and deploy its wings using a system of cables that expand and open telescopic tubes.
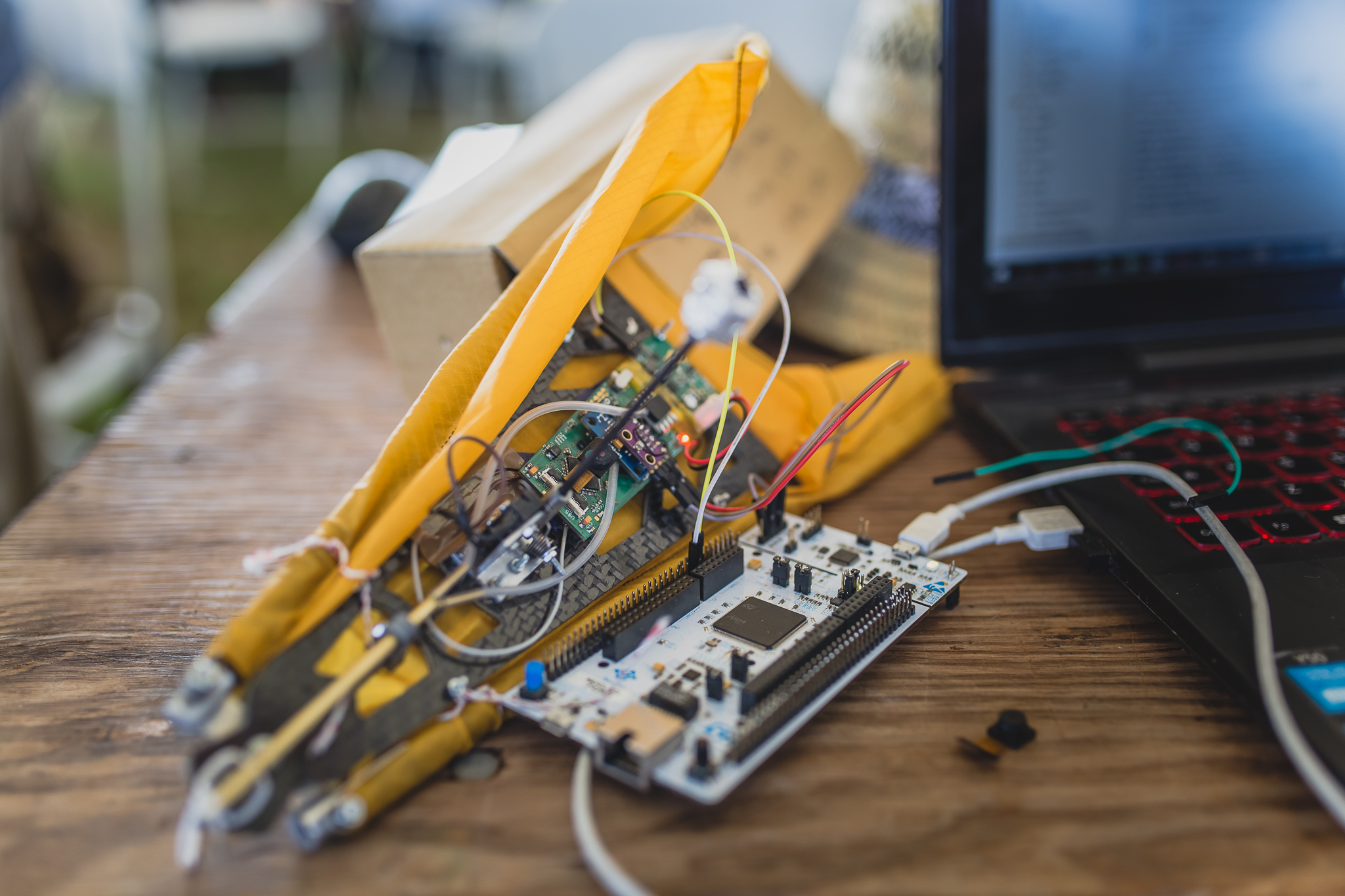
The probe was then supposed to glide in a spiral with a diameter not exceeding 1 km and a flight time as close as possible to 2 minutes. From the moment it was activated, it collected information such as temperature, pressure, accelerations, GPS coordinates, and flight speed using a Pitot tube. As an additional task, the probe was to take a photo on command received from the ground station and transmit it to the operator before landing. After landing, the probe would enter recovery mode, activate a buzzer, and the team members had to locate both the probe and the container.
The project faced many challenges throughout the year, resulting in significant delays in the schedule, which severely limited the ability to test the subsystems. However, all regulatory assumptions were met except for obtaining correct readings from the Pitot tube.
The mission was not without failures. During the final flight, the electronics we created worked flawlessly. Problems arose during the separation of the lander from the container. The line burning system triggered correctly, but the lander got stuck inside the shield and did not leave it. This prevented the gliding in the spiral.
The team presented the results of the mission and all the applied solutions during the Post Flight Review, which received high approval from the judges.
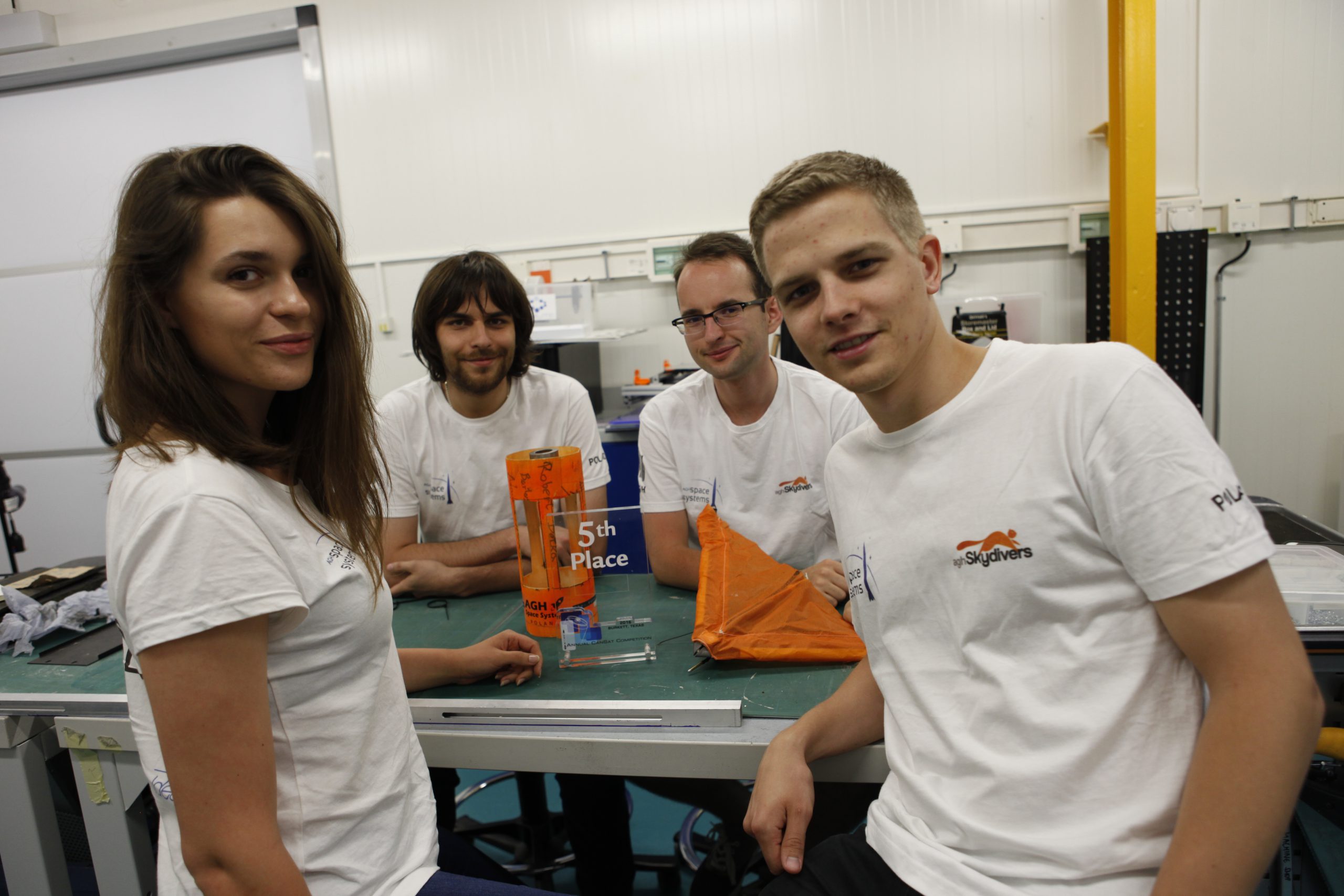
The team, performing under the name AGH Skydivers, thanks to the results in the initial stages of the competition (including 97.62% for the PDR documentation and 99.68% for the CDR documentation) and the final mission, beat 55 teams from around the world, securing 5th place in the CanSat Competition 2016.
The results of the year-long collaboration were summarized during the event “AGH Space Systems x CERN IdeaSquare cooperation summary conference,” which took place at IdeaSquare. In addition to the CanSat 2016 project, the hosts and members of the Kraków-based group presented their activities, and the guests included CERN and UN staff.
Leader: Jakub Rachucki
Mechanical Section: Weronika Mrozińska, Tomasz Strzałka
Electronics Section: Jakub Rachucki, Zbigniew Kostka, Bartosz Moczała
Ground Station Section: Jacek Garbuliński
Logistics and Marketing Section: Weronika Mrozińska, Bartosz Postulka