



In 2019, we participated for the fifth time in the CanSat Competition. This time, the mission of the probe was to use the phenomenon of autorotation to control the descent, protect the device from any damage that might occur during the flight, and collect telemetry data combined with transmission to the ground station. The host of the competition for the third time was Tarleton University in Texas. The strategic partner of the project, as in the previous year, was the company Solidbrain.
The probes in the form of planetary landers, created for the CanSat Competition, aim to bring students closer to the process of preparing and executing real space missions. This premise dictates the format of the documentation and construction testing, as well as the evaluation method. The first two stages of the competition involve writing the Preliminary Design Review and Critical Design Review documents and presenting them during a teleconference with judges from NASA. During the final, held in Texas, the team must present the components of the probe in terms of regulatory requirements and safety concerns. Then, rocket launches take place, followed by the presentation of mission results and conclusions drawn from them. Every year, the task set before the participants is slightly different, but the format of the competition remains unchanged.
Mission of the CanSat 2019 Probe:
The dimensions of the probe had to fit within a 125 mm diameter and 310 mm height – these were the dimensions of the rocket compartment from which the CanSat was to be launched to the required altitude.
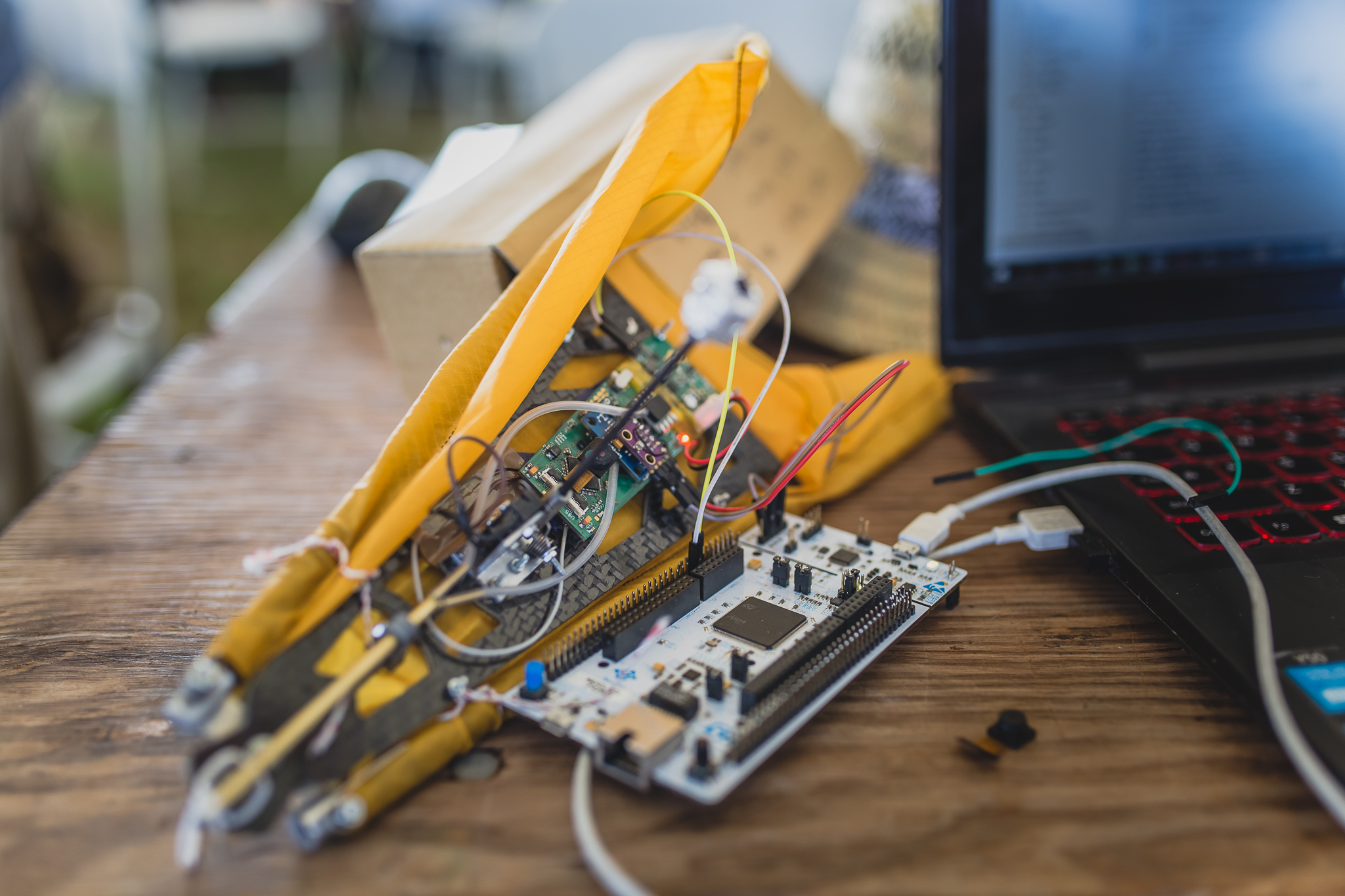
To optimally use the phenomenon of autorotation, the probe was equipped with a rotor that mechanically deployed after launch from the container. This solution allowed for the creation of a compact design, making more efficient use of the available space. Additionally, the orientation in space was controlled by three fins operated by a single servo. This use of rotation allowed for the maintenance of a constant direction and orientation in the air, with the camera placed on the probe always pointing towards the ground. The CanSat was also equipped with a parachute, ensuring an appropriate descent speed before the probe was deployed, as well as shock-absorbing legs for proper landing.
One of the most important tasks of the device was continuous transmission to the ground station via the XBee module. Precise measurements of pressure and temperature were transmitted, as well as information about the probe’s position and its orientation in space. The collected data was later used to prepare a presentation summarizing the mission (this was one of the main tasks influencing the team’s evaluation). The footage from the camera was stored on an SD card, and it could only be retrieved after landing – signaled by the CanSat transmitter and an audible signal.
The team reached the final of the competition, achieving a high score of 97.67% in the Preliminary Design Review. In the final stage of the competition, we competed with 39 teams from around the world. Another success was earning the maximum number of points in the Flight Readiness Review – the flight readiness assessment. The project also received high marks in the later stages. Unfortunately, during the actual mission, the container containing the probe was damaged, which caused unexpected behavior of the structure when separating from the rocket. Combined with strong winds, this made it impossible to recover the structure. However, thanks to the telemetry data collected during the flight, we were able to prepare a highly rated final presentation.
In CanSat Competition 2019, AGH Space Systems secured 3rd place out of over 40 teams from around the world.
Leader: Adam Kolusz
Mechanical Section: Adam Kolusz, Kornel Kowalczyk, Dagmara Stasiowska, Artur Biernat
Electronics Section: Mateusz Rajzer
Logistics and Marketing Section: Paweł Graczak, Joanna Dubielewska
