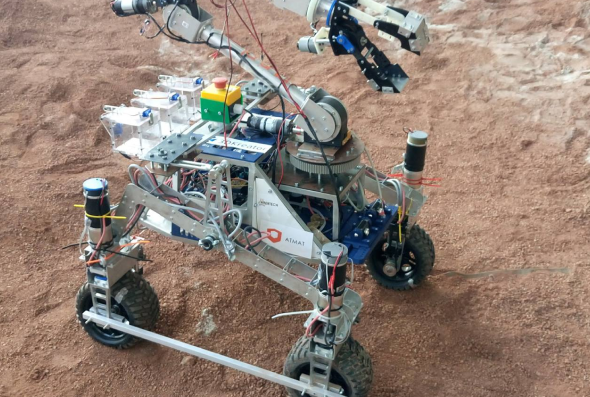

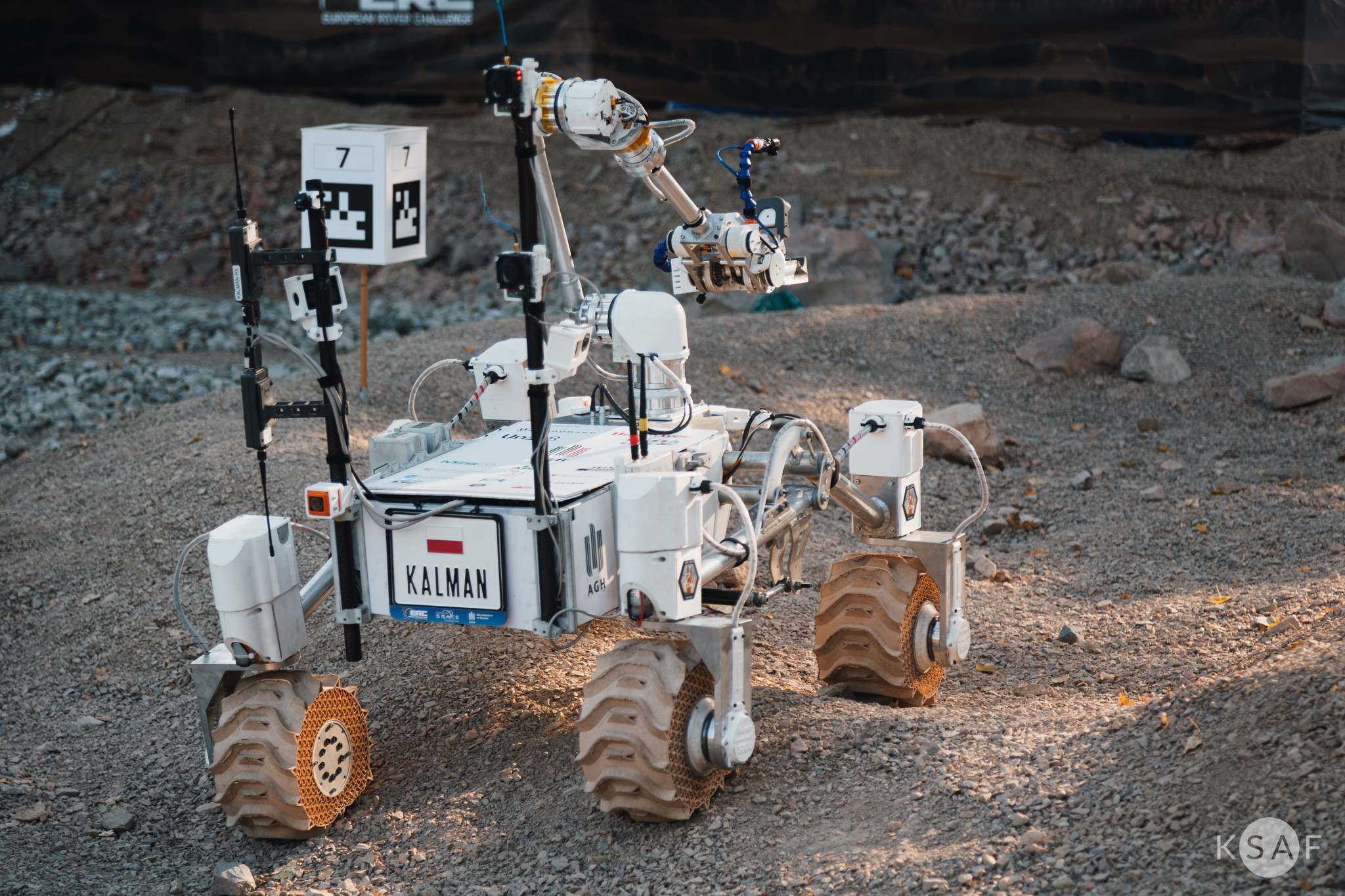
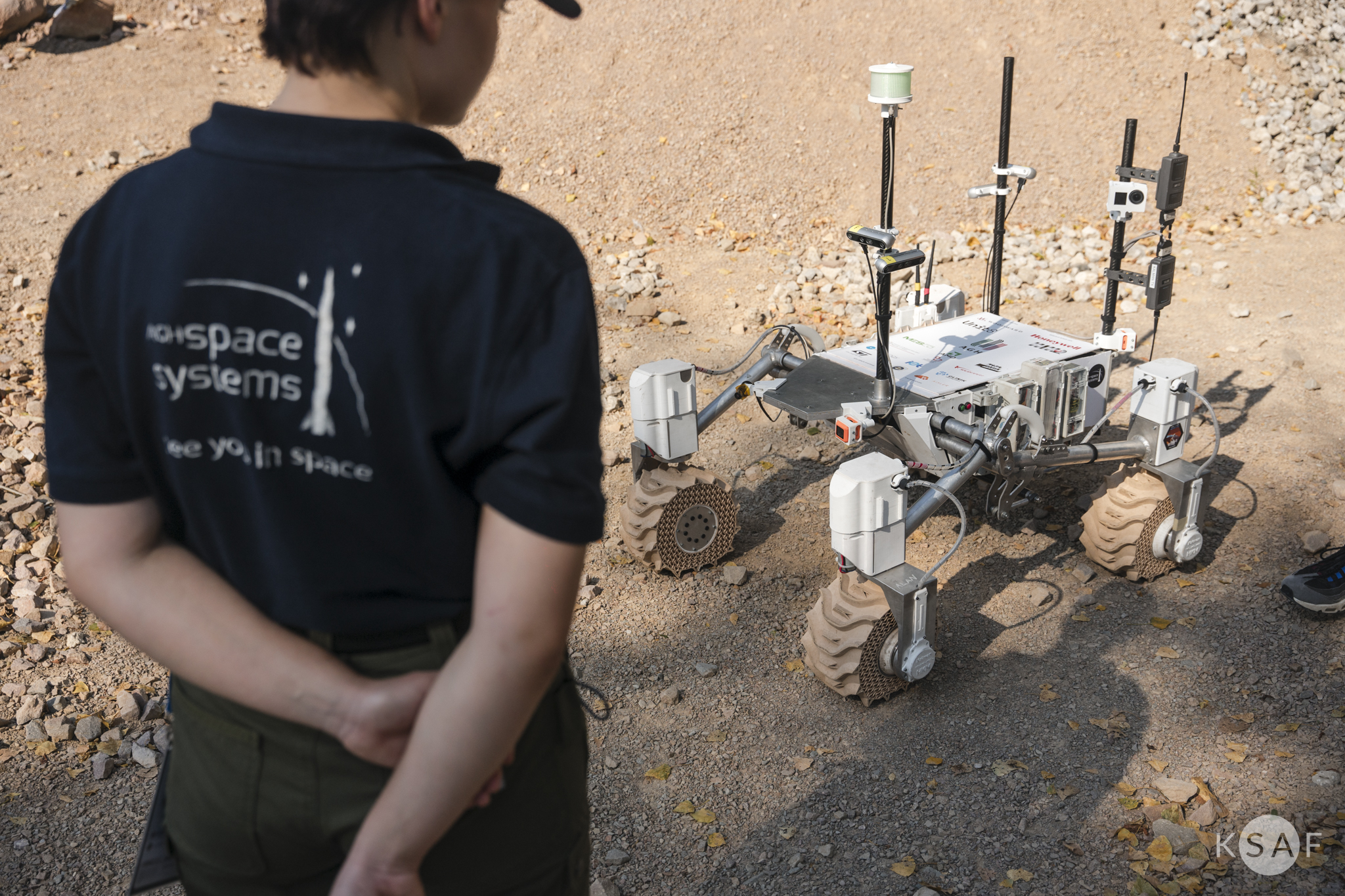
Kalman is the second planetary rover built by AGH Space Systems. Although it is the successor to Phobos, it features a completely new approach to system development, with a primary focus on modularity and simplicity of solutions. Due to the modular approach in the current design, nothing from 2017 remains in this construction.
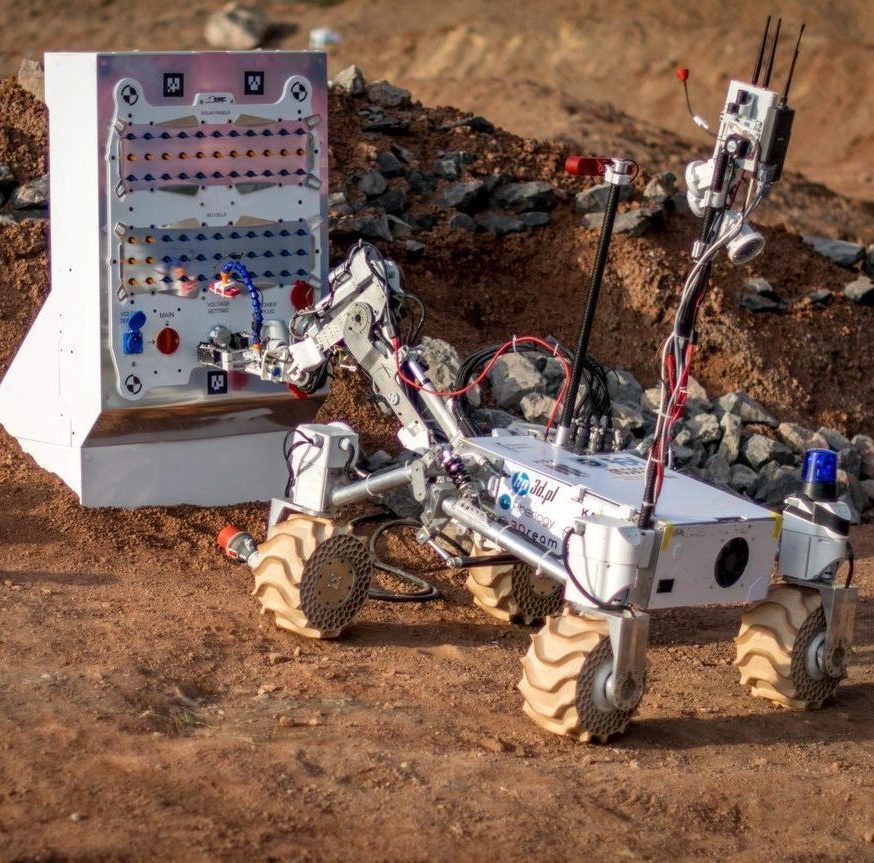
The new design is equipped with vision systems that enable remote control and terrain documentation. Additionally, a manipulator has been installed, allowing for various tasks such as moving objects, performing basic repair actions, and operating control panels. Kalman is also equipped with a mobile research laboratory for analyzing soil samples. The construction also features an autonomous driving mode, allowing it to independently navigate to specified coordinates across previously unknown terrain.
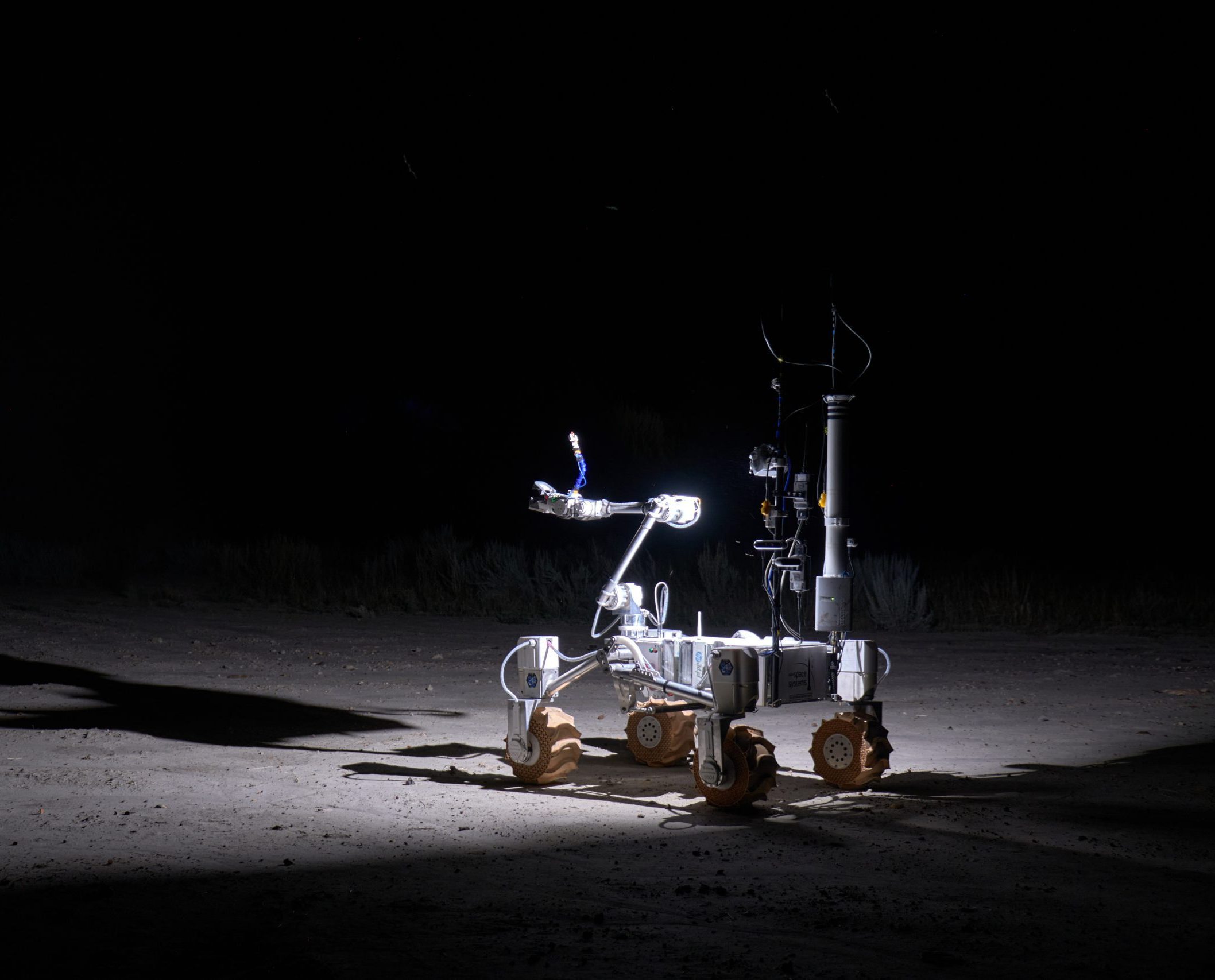
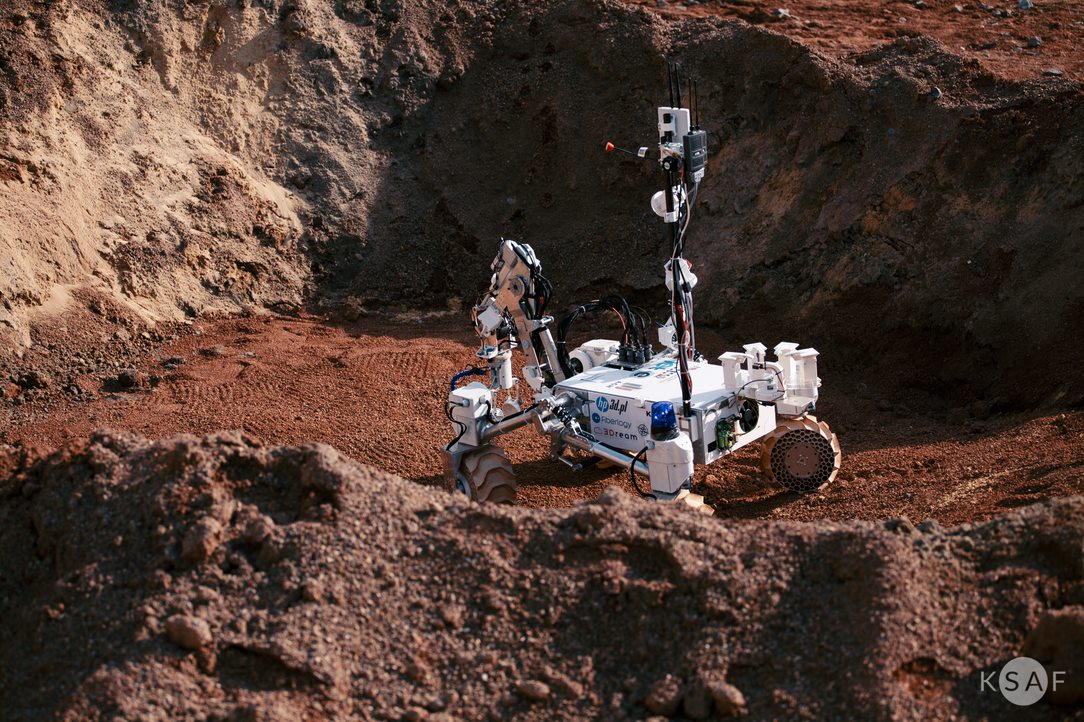
The goal of the project is to create a fully functional robot capable of navigating the challenging terrain of Mars and the Moon, testing new technologies essential for exploration, analyzing soil samples in search of signs of life, and assisting astronauts with minimal operator intervention. The validation of solutions takes place through participation in the Rover Challenge competitions, one of the most prestigious events in the robotics industry for students. These competitions take place worldwide, and their challenges replicate real-world problems faced by such constructions.
Another key goal of the project is to create a space for young, ambitious engineers and scientists who, by working on the project, gain experience and develop their careers in various industrial and scientific fields. The research and tests conducted within the project also contribute to the development of innovative technological solutions.
The foundation of the project is a set of design and organizational principles that ensure a consistent work methodology:
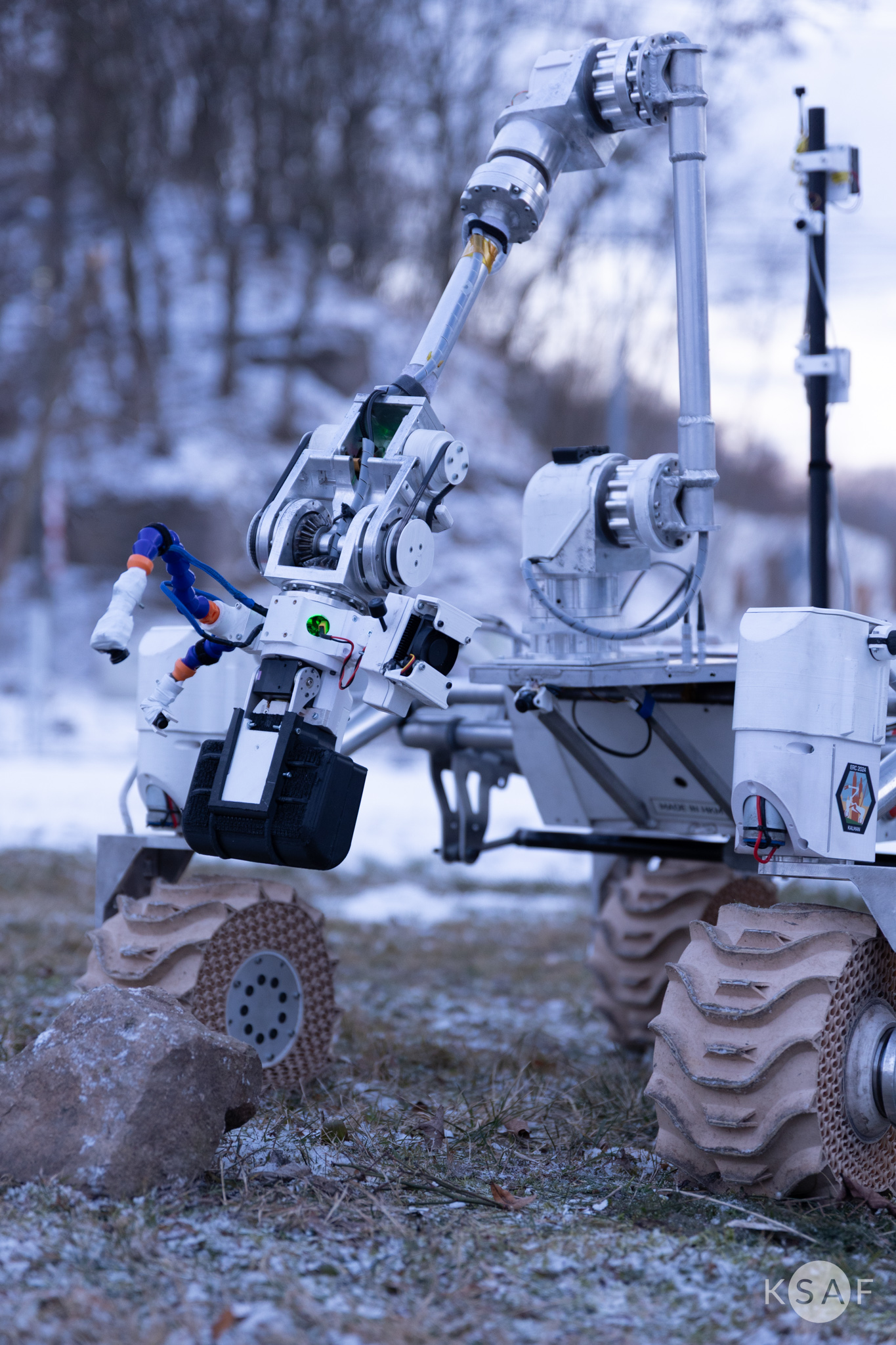
The rover’s design incorporates a number of innovative technical solutions that ensure optimal parameters:
The outcome of the project work is success in international mobile robotics competitions such as the Rover Challenge, in which the team regularly participates. These competitions serve as the most important test and summary of the year-long work on the rover’s design. The event organizers include scientists and research centers specializing in space activities, thus ensuring a reliable and objective assessment of the rover project.
In 2018, the team debuted with Kalman at the European Rover Challenge, and by the following year, they qualified for the University Rover Challenge in the United States, where they secured the 20th position. They also participated in the Indian Rover Challenge and the European Rover Challenge, taking second place in both. Another year of hard work on the rover’s development resulted in the first victory: winning 1st place at the Indian Rover Challenge in 2020.
In 2020, the project gained recognition from judges at the European Rover Challenge, receiving awards in the Best Presentation and Best Design categories. Despite the pandemic slowing down the development work, the team participated in the Virtual University Rover Challenge in 2021, where they placed 6th, and also in the European Rover Challenge 2021, securing 4th place. Being just outside the podium became a driving force for the continued development of the project.
In 2022, some of the project’s greatest achievements took place: securing 4th place at the University Rover Challenge, and a few months later, winning the European Rover Challenge. This victory provided the team with incredible motivation and the drive to aim even higher, leading them to participate in four competitions in 2023.

At the beginning of 2023, the team once again took 1st place at the International Rover Challenge. Next, they secured 1st place at the Canadian International Rover Challenge, and their work culminated in winning the European Rover Challenge for the second consecutive year. However, this is not the end of work on the construction. The Kalman planetary rover project is still being developed by young scientists and engineers. By working on it, they gain valuable experience and skills that are highly beneficial for their future professional and scientific careers.
The result of the work on the project includes numerous successes in international mobile robotics competitions from the Rover Challenge series, in which the team regularly participates. These competitions serve as a crucial test and summary of the year’s work on the construction. The events are organized by scientists and research centers specializing in space exploration, ensuring a reliable and objective evaluation of the rover project.
In 2018, the team participated for the first time in the European Rover Challenge with the Kalman rover. The following year, they managed to qualify for the University Rover Challenge in the United States, where the team placed 20th. Later that same year, the rover achieved great success, earning 2nd place at both the Indian Rover Challenge and once again at the European Rover Challenge.
The following months of intensive work brought the first victory. At the Indian Rover Challenge 2020, the team took the top spot on the podium. During the European Rover Challenge 2020, the project gained recognition from the judges, winning awards for Best Presentation and Best Design.
Although the pandemic caused delays in the development of the rover, the team continued to operate. In 2021, they participated in the Virtual University Rover Challenge, placing 6th, and in the European Rover Challenge 2021, where they finished in 4th place. Although the team was just shy of the podium, this result became a strong motivation to continue working.

The year 2022 brought further achievements for the Kalman rover. The team secured 4th place at the University Rover Challenge, and a few months later, they achieved a spectacular victory at the European Rover Challenge.
In 2023, the team triumphed again, winning 1st place at the International Rover Challenge. At the University Rover Challenge, they placed 8th in the world, while retaining the title of the best team from Europe. Another success was their victory at the Canadian International Rover Challenge, and the year ended with another win at the European Rover Challenge, solidifying the team’s position on the international stage.
The following year brought even more successes for the rover. Kalman won 1st place at the University Rover Challenge 2024 and also claimed 2nd place at the European Rover Challenge 2024.
Although the list of achievements is impressive, work on the Kalman rover continues. The project is being developed by young scientists and engineers, who gain valuable experience and skills useful for their future careers in both industry and research.
In addition to successes in robotics competitions, the research findings and scientific papers produced within the project are presented at prestigious events. The team has participated in the International Astronautical Congress in 2022, 2023, and 2024, the Robophilosophy Conference 2022 – Social Robots in Social Institutions, the Low Gravity Show, the Student Space Conference, World Space Week in Wrocław, and the Cracow Robotics & AI Meetup.
Participation in these events not only promotes space technologies and allows for the evaluation of applied solutions, but also provides team members with the opportunity to expand their knowledge and share their experiences.